The “Event Type” dialog allows you to select an event on one or more slave axes. An event is a programmable condition, which once set, is monitored for occurrence.
The “Event Type” dialog may be opened from:
| • | Events dialog: |
Event Type – called from Events dialog

| • | One of the following motion dialogs Trapezoidal Profiles, S-curve Profiles, External, Test: |
Event Type – called from a motion dialog
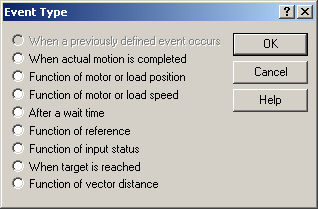
The events are grouped into 9 categories:
None – appears when the dialogue is opened from the “Events” dialogue. Check this item if you have already defined an event and now you want to: a) program a stop when the event occurs and/or b) program a time out condition.
Remark: The When a previously defined event occurs option is active only for TML applications developed for intelligent drives/motor.
When actual motion is completed – for programming the event: when the actual motion is completed on one or more slave axes.
Function of motor or load position – for programming the events: when the absolute or relative motor or load position of a slave axis is equal or over/under a value or the value of a variable.
Function of motor or load speed – for programming the events: when the motor or load speed of a slave axis is equal or over/under a value or the value of a variable.
After a wait time – for programming a time delay, using a time event. The monitored event is: when the relative time of the motion controller is equal with a value or the value of a variable.
Remark: The event on time can be programmed only for the motion controller.
Function of reference – for programming the events: when the position or speed or torque reference of a slave axis is equal or over/under a value or the value of a variable.
Function of inputs status – for programming the events: when capture inputs or limit switch inputs or general purpose inputs from a slave axis change status: low to high or high to low.
When target is reached – for programming the events: when the reference generator from one or more slaves completes the trajectory.
Function of vector distance – for programming the events: when the vector distance is equal or over/under a value or the value of a variable.
OK: Close this dialogue and save selected event
Cancel: Close this dialogue without saving the selected event
Help: Open this help page.
See also: