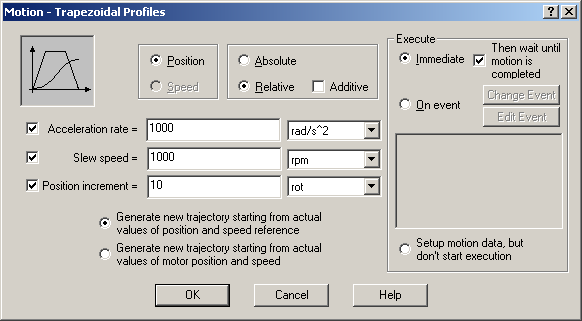
The “Motion – Trapezoidal Profiles” dialogue allows you to program a position or speed profile with a trapezoidal shape of the speed, due to a limited acceleration.
In the position profile, the load/motor is controlled in position. You specify either a position to reach in absolute mode or a position increment in relative mode, plus the slew (maximum travel) speed and the acceleration/deceleration rate. In relative mode, the position to reach can be computed in 2 ways: standard (default) or additive. In standard relative mode, the position to reach is computed by adding the position increment to the instantaneous position in the moment when the command is executed. In the additive relative mode, the position to reach is computed by adding the position increment to the previous position to reach, independently of the moment when the command was issued. During motion, you can change on the fly the position command, the slew speed and the acceleration/deceleration rate.
In the speed profile, the load/motor is controlled in speed. You specify the jog speed (speed sign specifies the direction) and the acceleration/deceleration rate. The load/motor accelerates until the jog speed is reached. During motion, you can change on the fly the slew speed and the acceleration/deceleration rate.
You can switch at any moment between position and speed profiles or to any of these from another motion mode.
IMPORTANT: Some setup configurations foresee a transmission ratio between the motor and the load. In these cases, the load position and speed are different from the motor position and speed. The motion parameters refer always to the load trajectory.
Choose Position to program a position profile. Select positioning mode Relative or Absolute. For relative positioning, check Additive to add the position increment to the position to reach set by the previous motion command. Set the values of the Acceleration rate and the Slew speed. Select the measuring units from the lists on the right. In the absolute positioning mode, set the value of the Position to reach. In the relative positioning, set the value of the Position increment.
Remark: The position profile option is available only if the drive/motor is setup to perform position control.
Choose Speed to program a speed profile. Set the values of the Acceleration rate and the Jog speed. Select the measuring units from the lists on the right.
Remark: Speed profile option is active if the drive/motor is setup to perform speed control or position control with speed loop closed.
Once set, the trapezoidal profile parameters are memorized. If you intend to use the same values as previously defined for the acceleration rate, the slew or jog speed, the position increment or position to reach you don’t need to set their values again in the following trapezoidal profiles. Use the checkboxes on the left to uncheck those parameters that remain unchanged. When a parameter is unchecked, you don’t need to give it a value.
Remark: The additive mode for relative positioning is not memorized and must be set each time a new additive relative move is set.
Select Generate new trajectory starting from actual values of position and speed reference if you want the reference generator to compute the motion profile starting from the actual values of the position and speed reference. Use this option for example if successive standard relative moves must be executed and the final target position should represent exactly the sum of the individual commands. Select Generate new trajectory starting from actual values of load/motor position and speed if you want the reference generator to compute the motion profile starting from the actual values of the load/motor position and speed. When this option is used, at the beginning of each new motion profile, the position and speed reference are updated with the actual values of the load/motor position and speed. Use this option for example if during a motion an external input triggers a stop on a precise position relative to the trigger point. Another situation to use this option is at recovery from an error or any other condition that disables the motor control while the motor is moving. Updating the reference values leads to a “glitch” free recovery because it eliminates the differences that may occur between the actual load/motor position/speed and the last computed position/speed reference (before disabling the motor control).
Remark: In open loop control of steppers, this option is ignored because there is no position and/or speed feedback.
Choose Execute Immediate to start the programmed motion immediately when the motion sequence is executed. Check Then wait until motion is completed if you want to postpone the start of the following motion until this programmed motion is completed.
Remark: Verify the motion complete condition parameters. If these are incorrectly set, you may never reach the motion complete condition:
| • | POSOKLIM – the settle band tolerance, expressed in internal position units |
| • | TONPOSOK – the stabilize time, expressed in internal time units |
| ▪ | 1 = uses the above parameters, |
| ▪ | 0 = sets motion complete when the reference generator has completed the trajectory and has arrived to the commanded position |
If these parameters have not been set previously, check their default value. Reset the drive/motor and using the command interpreter get their value.
Choose Execute On event to start this new motion when a programmable event occurs. Click Change Event to select the event type or Edit Event to modify the parameters of the selected event (see Events for details). Select Setup motion data, but don’t start execution if you want only to set the motion parameters without starting the execution.
OK: Close this dialogue and save the motion sequence in your motion sequence list.
Cancel: Close this dialogue without saving the motion sequence in your motion sequence list.
Help: Open this help page.
See also:
Trapezoidal Position Profiles – TML Programming Details
Trapezoidal Speed Profiles – TML Programming Details
Trapezoidal Position Profiles – Related TML Instructions and Data
Trapezoidal Speed Profiles – Related TML Instructions and Data