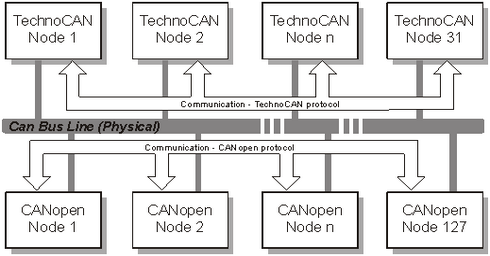
TechnoCAN is an alternate protocol to TMLCAN – the default CAN-bus protocol for the Technosoft drives/motors without CANopen. TechnoCAN was specifically designed to permit connection of the Technosoft drives/motors without CANopen on a CANopen network where messages are exchanged using CANopen protocol. TechnoCAN and CANopen do not disturb each other and therefore can co-exist on the same physical bus.
On request, the Technosoft drives/motors without CANopen may be delivered with TechnoCAN protocol. The difference between the drives/motors with TMLCAN protocol and those with TechnoCAN protocol is done only through the firmware: all the Technosoft products equipped with TechnoCAN have a firmware number starting with 2 i.e. a firmware code is F2xxY, where 2xx is the firmware number and Y is the firmware revision.
TechnoCAN is based on CAN2.0A using 11 bits for the identifier. It accepts the following baud rates: 125kb, 250kb, 500kb (default after reset), 800kb and 1Mb. Like TMLCAN, TechnoCAN offers the possibility to connect a PC via a serial RS-232 link to any drive/motor from the CANopen network and through it to access all the Technosoft drives/motors. In this case, this drive/motor connected both to CAN-bus and RS-232 becomes a relay axis (see Communication protocols – Overview for details)
In TechnoCAN the TML instructions are split into 8 categories:
| a) | Normal – includes all the TML instructions addressed to a single drive/motor (axis) |
| b) | TakeData – includes the answer “TakeData” to the request “GiveMeData” |
| c) | Group – includes all the TML instructions multicast to a group of drives/motors |
| d) | Host – includes the answers to all the other on line TML commands except “TakeData” |
| e) | PVT – includes the instruction PVTP (the instruction is to long to be sent as a normal message) |
| f) | Synchronisation – includes the synchronization message for the group 0 |
| g) | Broadcast – includes all the TML instructions addressed to the group 0 (to the all drives in the system) except the request GiveMeData. |
| h) | TakeData2 – includes the answers “TakeData2” to the request “GiveMeData2” |
Each category is mapped in the following range of COB-ID (Communication Object Identifier – CANopen terminology for a CAN message identifier):
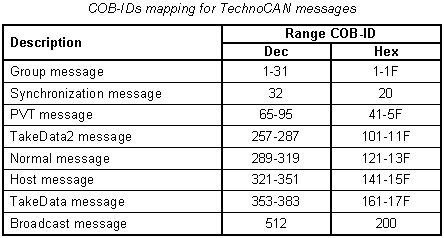
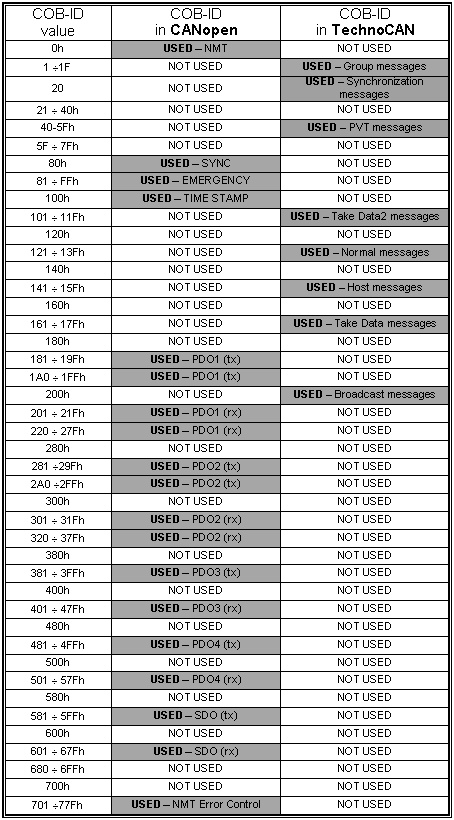
TechnoCAN uses only COB-IDs outside of the range used by CANopen. Thus, TechnoCAN protocol and CANopen protocol can co-exist and communicate simultaneously on the same physical CAN bus, without disturbing each other.
The next table shows how TechnoCAN COB-IDs are assigned in relation with the CANopen COB-IDs.
CANOpen and TechnoCAN COB-IDs
Remarks: In comparison with TMLCAN, TechoCAN has the following restrictions:
| • | The maximum number of axes is 31: possible Axis ID values: 1 to 31 |
| • | The maximum number of groups is 5: possible Group ID values: 1 to 5 |
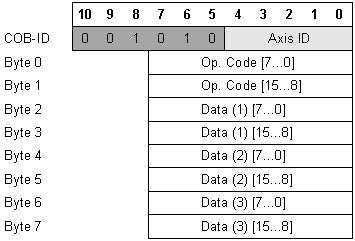
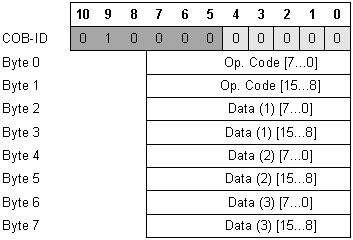
Normal messages encapsulation: COB-ID: 121h – 13Fh
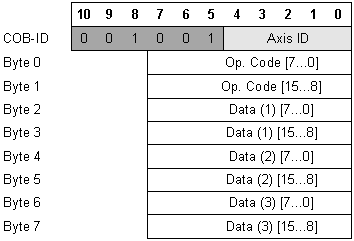
Host messages encapsulation: COB-ID: 141h – 15Fh
Remark: Host messages occur only when a drive/master answers to a data request (other then “GiveMeData”) where the Sender Axis ID has the HOST bit set to 1. This happens for example when the host is a PC connected to one of the drives/motors via RS-232 and asks a data from another drive/motor. The answer will be sent to the relay axis as a Host message. The Host messages do not occur when the request is sent by a drive or by a host/master connected directly on the CAN bus.
Take Data messages encapsulation: COB-ID: 161h – 17Fh
Remarks: In the Take Data messages, the 10-byte code of the Take Data TML instruction is compacted to 8-bytes. This is done in the following way:
| • | From the 16-bit Operation Code, only the first 10LSB are transmitted. The 6MSB are always constant: 0x2D (101101b) and are not transmitted. The receiver of a Take Data message must add 0x2D on the 6MSB of the Operation Code received in order to restore the full 16-bit code for TakeData instruction. |
| • | The HOST bit is transmitted in bit 2 of byte 1. There is no need to send the GROUP bit because the GiveMeData request can’t be sent to a group of drives/motors. |
| • | The first data word of the TakeData TML instruction is the Sender Axis ID. As the maximum number of drives is limited to 31, only bits 8-4 are useful and are transmitted. |
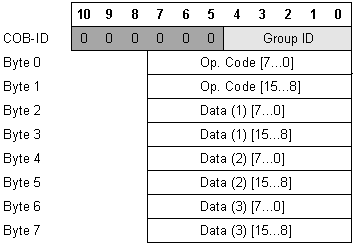
Group messages encapsulation: COB-ID: 001h – 01Fh
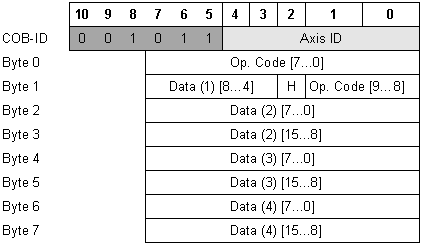
PVT messages encapsulation: COB-ID: 041h – 05Fh
Remarks: In the PVT messages, the 10-byte code of the PVT TML instruction is compacted to 8-bytes. This is done in the following way:
| • | The Operation Code is not transmitted. The receiver of a PVT message adds 0x6 on the 9MSB of the Operation Code received and the Counter value on the 7LSB in order to restore the full 16-bit code for PVT instruction. |
| • | The first data word of the PVT instruction contains the 15LSB of the 24 bits Position |
| • | The second data word of the PVT instruction contains the 8LSB of the 24 bits Speed value and the 8 MSB of the 24 bits Position value. |
| • | The third data word of the PVT instruction contains the 16MSB of the 24 bits Speed value. |
| • | The fourth data word of the PVT instruction contains the 9bits Time value. |
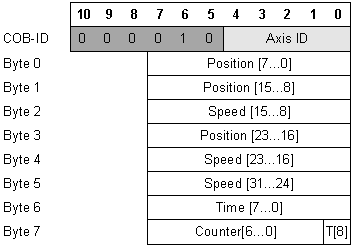
Synchronization messages encapsulation: COB-ID: 020h

Remarks:
| • | The message has zero data bytes |
| • | The Operation Code is 0x1000 |
| • | The synchronization messages are broadcast messages; they are received by every drive connected to the network |
Broadcast messages encapsulation: COB-ID: 200h
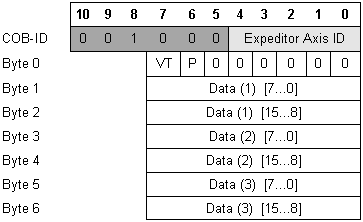
Take Data 2 messages encapsulation: COB-ID: 101h – 11Fh
Remarks:
| • | The message will be never receive by one of the Technosoft drive, the message is dedicate for other drives. |
| • | The COB-ID contains the Expeditor Axis ID for the host to get the answers one by one, prioritized in the ascending order of the expeditors’ axis ID. |
| • | The VT bit specifies the data length (VT = 0 for 16bits or VT = 1 for 32 bits) and is transmitted in the first byte sent. |
| • | The P bit specifies if the message is TakeData2, in reply to a GiveMeData2 message, or a PONG, in reply to a PING message. The PING message is a broadcast message that requests the Axis ID and the firmware version of the drives in the network. For P=0 the message is Take Data2 and for P = 1 the message is a PONG (the VT bit is automatically reset and it has no meaning). |
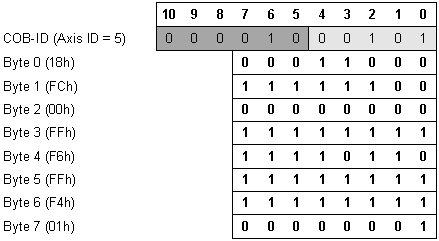
Example 1: A host connected on a CANopen network sends to drive/motor with axis ID = 5 the TML instruction “KPP = 0x1234” (set proportional part of the position controller with value 0x1234). The Axis ID Code and the TML instruction binary code are:
Binary code of TML instruction KPP =0x1234
![]()
Remark: Use Binary Code Viewer to get the binary code of TML instructions
The host must send a TechnoCAN message with the following contents:
TechnoCAN message: TML instruction KPP =0x1234 sent to axis 5
Remark: The last 4 bytes are not used and are not transmitted
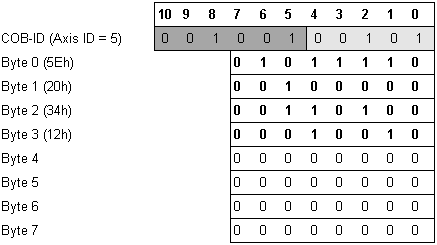
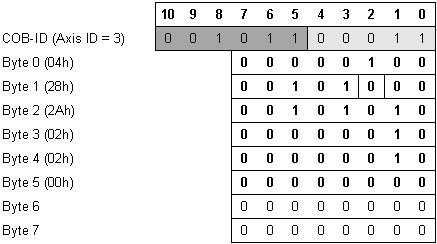
Example 2: A host connected on a CANopen network wants to get the value of the position error from the drive/motor with the axis ID=5. The host axis ID is 3. The position error is the 16-bit TML variable named POSERR and its address in the TML data memory is 0x022A. The host sends to axis 5 a “GiveMeData” request for the TML variable POSERR and waits for the “TakeData” answer.
The Axis ID Code and the binary code of “GiveMeData” request for POSERR are:
Binary code of GiveMeData request for POSERR value sent to axis 5

The host must send a TechnoCAN message with the following contents:
TechnoCAN message: GiveMeData request for POSERR value sent to axis 5
Remark: The last 2 byes are not used and are not transmitted.
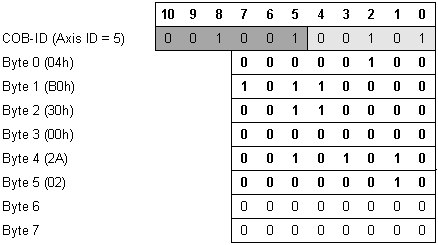
Supposing that the drive/motor with Axis ID = 5 returns a position error POSERR = 2, the Axis ID Code and the binary code of the “TakeData” answer is:
Binary code of TakeData with POSERR value from axis 5

The host gets a TechnoCAN message with the following contents:
TechnoCAN message: TakeData with POSERR value from axis 5
Remark: The last 2 byes are not used and are not transmitted.
Example 3: A PVT command is sent to the drive with the axis ID 5 like following: pvtp -1000L, -10, 500U, 0 (set the coordinates for the next point the position at -1000 IU = 0,5 rot = FFFC18h, the speed at -10IU = 300 rpm = FFF600 and the time 500IU = 0,5s = 01F4 ).
Binary code of PVT command sent to axis 5

The TechnoCAN message sent has the following contents:
TechnoCAN message: PVT command for axis 5
Example 4: If a Technosoft drive/motor receives the TML instruction SETSYNC 20, it becomes the synchronization master and starts sending every 20ms a synchronization message and its time to the all drives connected in the CAN bus network.
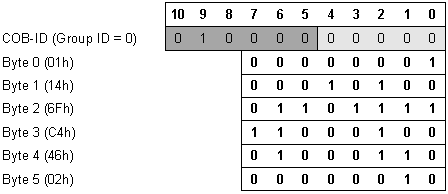
At a moment the master time has the value 0x246C46F and the code of TML instruction is the following:
Binary code of Set Master Time command sent to all axes

The TechnoCAN messages are:
| • | The synchronization message that when it is received by everybody specifics time variables are saved. |
TechnoCAN message: Synchronization command for all axes
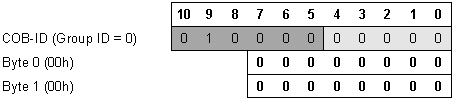
Remark: The last 8 bytes are not used and are not transmitted.
| • | The master broadcast messages with the command to the slaves to set the master time |
TechnoCAN message: Set Master Time command to all axes
Example 5: If for example the axis 2 encounters a control error, the drive sends a message with the value of the error register MER (0x0008) with a TakeData2 instruction which has the following content:
Binary code of TakeData 2 with MER register value from axis 2

Remark: The VT bit is set to zero
The TechnoCAN message sent has the following contents:
TechnoCAN message: TakeData2 command from axis 2
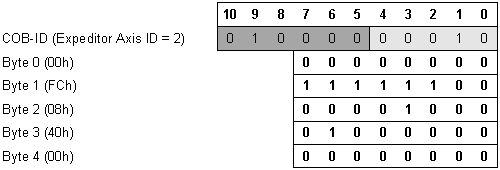
Remark: The last 3 byes are not used and are not transmitted.
See also:
Communication protocols – Overview
Message structure. Axis ID and Group ID