- « Back to Catalog
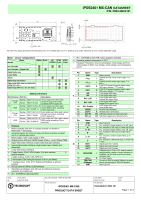
iPOS2401 MX-CAN 7-30V 0.9A 24W CANopen / TMLCAN

Variateur numérique, taille réduite, contrôleur intégré
Pour moteurs avec ou sans balais et pas-à-pas
Alimentation moteur / logique: 7-30 V
Courant de sortie: 0.9 A
Communication: TMLCAN & CANopen
Carte PCB enfichable horizontalement
Dimensions: 46.5 x 19.2 x 8.5 mm
- Connecteurs standard d`embase; pas: 2 mm
Commande sinusoïdale (FOC) ou trapézoïdale (Hall) des moteurs sans balais
Commande en boucle ouverte ou en boucle fermée de moteurs pas-à-pas biphasés et triphasés
Différents modes de fonctionnement: contrôle du couple, de la vitesse ou de la position; profils de position ou de vitesse; référence analogique externe, ou envoyée via un bus de communication
Ensemble d`instructions TML pour la définition et l`exécution de séquences de mouvements
Fonctionnement autonome avec des séquences de mouvement mémorisées
Communication:
Série RS-232
CANopen (Norme CiA DS 402) ou Technosoft TMLCAN
Cycles de communication EtherCAT, min. 900 µs; protocole d`application CAN sur EtherCAT (CoE)
E/S numériques et analogiques:
5 entrées numériques: 5-24 V, NPN (Activer, 2 interrupteurs fin de course et 2 entrées universelles)
2 sorties numériques: 5-24 V, 0,5 A, NPN collecteur ouvert (usage général)
1 entrée analogique: 12-bit, 0-5 V: référence ou usage général
Codeurs supportés:
Codeur incrémental quadruple (monotour, collecteur ouvert et différentiel)
Capteurs à effet Hall numériques
Configuration et programmation faciles avec la plate-forme logicielle EasyMotion Studio
Protection contre les surtempératures, surintensités, courts-circuits, défauts à la terre, sur- ou sous-tensions, I2t, erreurs de commande - Supply Voltage:
- 12 V,24 V
- Output Current - Nominal:
- 0.9 A
- Peak Current:
- Communication:
- RS-232,CANopen / TMLCAN
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Sensors:
- Incremental,Digital Halls,Analog Halls,Tacho,Sensorless
- Motion Control:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Digital Inputs:
- 5
- Digital Outputs:
- 2
- Analog Inputs:
- 1
-

iPOS2401 MX-CAN
Fiche technique -

iPOS2401 MX-CAN
Manuel d`utilisation
iPOS2401 MX-CAN
I/O board - EasyMotion Studio Demo
TML Motion Librairies
CANopen manuel de programmation (ESM I)
CANopen manuel de programmation (ESM II)
CANopen EDS fichiers -


iPOS2401 MX-CAN
Diagramme de connexion - P024.300.E101 – iPOS2401 MX-CAN; 24 V, 0.9 A, pin-plug, encoder, CAN
P024.300.E804 – iPOS2401 MX-CAN Starter Kit, brushless motor
P024.300.E800 – iPOS2401 MX-CAN Starter Kit, without motor
P034.002.E001 – EasyMotion Studio II (software)
iPOS2401 MX-CAN 7-30V 0.9A 24W CANopen / TMLCAN
- Connecteurs standard d`embase; pas: 2 mm
Commande sinusoïdale (FOC) ou trapézoïdale (Hall) des moteurs sans balais
Commande en boucle ouverte ou en boucle fermée de moteurs pas-à-pas biphasés et triphasés
Différents modes de fonctionnement: contrôle du couple, de la vitesse ou de la position; profils de position ou de vitesse; référence analogique externe, ou envoyée via un bus de communication
Ensemble d`instructions TML pour la définition et l`exécution de séquences de mouvements
Fonctionnement autonome avec des séquences de mouvement mémorisées
Communication:
Série RS-232
CANopen (Norme CiA DS 402) ou Technosoft TMLCAN
Cycles de communication EtherCAT, min. 900 µs; protocole d`application CAN sur EtherCAT (CoE)
E/S numériques et analogiques:
5 entrées numériques: 5-24 V, NPN (Activer, 2 interrupteurs fin de course et 2 entrées universelles)
2 sorties numériques: 5-24 V, 0,5 A, NPN collecteur ouvert (usage général)
1 entrée analogique: 12-bit, 0-5 V: référence ou usage général
Codeurs supportés:
Codeur incrémental quadruple (monotour, collecteur ouvert et différentiel)
Capteurs à effet Hall numériques
Configuration et programmation faciles avec la plate-forme logicielle EasyMotion Studio
Protection contre les surtempératures, surintensités, courts-circuits, défauts à la terre, sur- ou sous-tensions, I2t, erreurs de commande Variateur numérique, taille réduite, contrôleur intégré
Pour moteurs avec ou sans balais et pas-à-pas
Alimentation moteur / logique: 7-30 V
Courant de sortie: 0.9 A
Communication: TMLCAN & CANopen
Carte PCB enfichable horizontalement
Dimensions: 46.5 x 19.2 x 8.5 mm- Analog Inputs:
- 1
- Supply Voltage:
- 12 V,24 V
- Communication:
- RS-232,CANopen / TMLCAN
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Digital Inputs:
- 5
- 2
- Digital Outputs:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Motion Control:
- 0.9 A
- Output Current - Nominal:
- Incremental,Digital Halls,Analog Halls,Tacho,Sensorless
- Sensors:
- Peak Current:
-
iPOS2401 MX-CAN
Fiche technique -
iPOS2401 MX-CAN
Manuel d`utilisation
iPOS2401 MX-CAN
I/O board - EasyMotion Studio Demo
TML Motion Librairies
CANopen manuel de programmation (ESM I)
CANopen manuel de programmation (ESM II)
CANopen EDS fichiers -
iPOS2401 MX-CAN
Diagramme de connexion - P024.300.E101 – iPOS2401 MX-CAN; 24 V, 0.9 A, pin-plug, encoder, CAN
P024.300.E804 – iPOS2401 MX-CAN Starter Kit, brushless motor
P024.300.E800 – iPOS2401 MX-CAN Starter Kit, without motor
P034.002.E001 – EasyMotion Studio II (software)