- « Back to Catalog
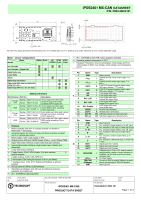
iPOS2401 MX-CAN 7-30V 0.9A 24W CANopen/TMLCAN

Intelligent, compact and freely programmable motor controller
For brushless, DC brush and step motors
Motor supply / logic supply: 7 – 30 VDC / 7 – 40 VDC
Output current: 0.9 A continuous / peak
Communication via RS232, TMLCAN and CANopen interfaces
Modular plug-in modules with very high integration density
For soldering / plugging in with pin headers with a pitch of 2 mm
Size (L x W x H): 46.5 x 19.2 x 8.5 mm
Ultra-compact 4-quadrant controller for controlling brushed DC motors, brushless DC motors and stepper motors with an output of up to 24 watts. The iPOS2401 is an intelligent, freely programmable servo controller with an integrated output stage, MotionChip ™ controller, I / O signals and CAN bus interface in one unit. The iPOS2401 is designed as a module for soldering / plugging in and offers an ideal solution for various applications with critical space requirements.
Electrical characteristics:
Supply voltage for logic / power: 7-40 VDC / 7-30 VDC
Output current: 0.9 A continuous / peak current
Motor types:
Brushless DC motors (BLDC, PMSM motors)
Brushed DC motors (DC motors)
Stepper motors (2- or 3-phase)
Voice coil actuators
Linear motors
Feedback options:
Incremental encoder
Absolute encoders (optional)
Digital Hall-sensors
Analog Hall-sensors
Control:
Via CAN Bus, pulse and direction or analog/digital inputs
Autonomous execution of complex motion sequences stored in the nonvolatile memory of the drive.
Communication:
RS232 - up to 115 Kbit/s
CANopen - according to CiA profiles 301, 305 and 402
TMLCAN - Technosoft proprietary CAN protocol
Ethernet - optional via an additional communication module
Digital and analog inputs/outputs:
5 digital inputs: 5-24 V, NPN
2 digital outputs: 5-24 V, 0.5 A, NPN Open-Collector
1 analog input: 12 bit, 0-5 V
Possibility to use a digital output for controlling an external motor/holding brake
Integrated brake chopper function for controlling an external brake resistance
Safety: Protection against over-current, over-temperature, under-voltage and over-voltage, I2t and following error.
Control features:
Sinusoidal commutation with field-oriented control (FOC) via encoder, Hall sensors or sensorless.
Fast and accurate control loop structure with customizable sampling rate and PWM frequency up to 120KHz
Outstanding resonance and vibration suppression through the flexible, simultaneous use of 2 BiQuad filters.
Closed-loop with sinusoidal commutation and field-oriented control (FOC) when encoder available.
Open loop with up to 512 microsteps per full step, step loss detection and automatic position compensation when encoder available on the load.
Operating modes:
Position, speed and torque control
Path generator with trapezoidal and sinusoidal ramps
Profile Position Mode, Velocity Mode, Homing Mode
Interpolated position with linear (PT) and cubic splines (PVT)
Cyclic Synchronous Position (CSP)
Electronic gears (EGEAR) and cams (ECAM)
Motion contouring via position, speed, torque or voltage
Analogue external reference, pulse and direction
EasyMotion Studio-Software:
Graphic programming interface with many functions and wizards for simple commissioning, configuration and local programming of complex sequence programs in single-axis or multi-axis systems.
Enables the selection of motor type, encoder interface and control structure as well as the setting of protection and controller parameters.
Automatic determination of the PID controller parameters (autotuning).
Extended analysis and optimization tools integrated using the control panels, loggers and scope functionalities.
TML Library: The TML Motion Libraries can work under Windows (32-bit and 64-bit versions available), or Linux operating system and can be included in an application developed under C/C++, C#, Visual Basic, Delphi Pascal, or LabVIEW. TML_Lib is a collection of high-level functions allowing to control, from a PC, the Technosoft intelligent drives and motors. The protocol is TML and communication can take place via RS232, CAN bus, Ethernet or USB.
Technosoft Motion Language (TML) programming language: Using the TML language, different operating modes, movement profiles, reference runs or the control of complex sequence programs can be graphically programmed and executed autonomously. The drive controllers can process analog and digital I / O signals, perform arithmetic and logical operations, and also exchange data and commands between the axes. Single-axis and multi-axis stand-alone applications can be easily implemented with self-created sequence programs, even without the use of a complex CANopen or EtherCAT master controller.
MotionChip ™ technology: The main core of all Technosoft servo controllers is the MotionChip ™ - an intelligent, freely programmable motion controller specially designed for complex motion control tasks. The MotionChip ™ offers the possibility to use the powerful digital signal processors (DSP) from Texas Instruments as an independent, intelligent unit. As a result, many tasks of a complex master control are solved directly by the MotionChip ™, so that the global function of a machine is relieved and the management of a master application can be optimized. All-important control functions of a controller such as a multitude of operating modes, PLC properties, protection and safety functions as well as support for the different interface and motor technologies are accommodated on the MotionChip ™, thus enabling flexible use in a wide variety of drive systems.- Supply Voltage:
- 12 V,24 V
- Output Current - Nominal:
- 0.9 A
- Continuous/Peak Current:
- 0.9/0.9 A
- Communication:
- RS-232,CANopen / TMLCAN
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Sensors:
- Incremental,Digital Halls,Analog Halls,Tacho,Sensorless
- Motion Control:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Digital Inputs:
- 5
- Digital Outputs:
- 2
- Analog Inputs:
- 1
-

iPOS2401 MX-CAN – Datasheet -

iPOS2401 MX-CAN – User manual
iPOS2401 MX-CAN – I/O board - EasyMotion Studio Demo
Motion Libraries
CANopen Programming Manual
EDS file for CANopen -


iPOS2401 MX-CAN – Connection diagram - Recommended products:
P020.002.E122 – Micro 4804 MZ-CAT 48V, 4 A, EtherCAT, plug-in
P020.002.E102 – Micro 4804 MZ-CAN 48V, 4 A, CAN, plug-in
P020.022.E122 – Micro 4804 LZ-CAT 48V, 4 A, EtherCAT, plug-in
P020.022.E102 – Micro 4804 LZ-CAN 48V, 4 A, CAN, plug-in
P034.001.E002 – EasyMotion Studio (software)
iPOS2401 MX-CAN 7-30V 0.9A 24W CANopen/TMLCAN
Ultra-compact 4-quadrant controller for controlling brushed DC motors, brushless DC motors and stepper motors with an output of up to 24 watts. The iPOS2401 is an intelligent, freely programmable servo controller with an integrated output stage, MotionChip ™ controller, I / O signals and CAN bus interface in one unit. The iPOS2401 is designed as a module for soldering / plugging in and offers an ideal solution for various applications with critical space requirements.
Electrical characteristics:
Supply voltage for logic / power: 7-40 VDC / 7-30 VDC
Output current: 0.9 A continuous / peak current
Motor types:
Brushless DC motors (BLDC, PMSM motors)
Brushed DC motors (DC motors)
Stepper motors (2- or 3-phase)
Voice coil actuators
Linear motors
Feedback options:
Incremental encoder
Absolute encoders (optional)
Digital Hall-sensors
Analog Hall-sensors
Control:
Via CAN Bus, pulse and direction or analog/digital inputs
Autonomous execution of complex motion sequences stored in the nonvolatile memory of the drive.
Communication:
RS232 - up to 115 Kbit/s
CANopen - according to CiA profiles 301, 305 and 402
TMLCAN - Technosoft proprietary CAN protocol
Ethernet - optional via an additional communication module
Digital and analog inputs/outputs:
5 digital inputs: 5-24 V, NPN
2 digital outputs: 5-24 V, 0.5 A, NPN Open-Collector
1 analog input: 12 bit, 0-5 V
Possibility to use a digital output for controlling an external motor/holding brake
Integrated brake chopper function for controlling an external brake resistance
Safety: Protection against over-current, over-temperature, under-voltage and over-voltage, I2t and following error.
Control features:
Sinusoidal commutation with field-oriented control (FOC) via encoder, Hall sensors or sensorless.
Fast and accurate control loop structure with customizable sampling rate and PWM frequency up to 120KHz
Outstanding resonance and vibration suppression through the flexible, simultaneous use of 2 BiQuad filters.
Closed-loop with sinusoidal commutation and field-oriented control (FOC) when encoder available.
Open loop with up to 512 microsteps per full step, step loss detection and automatic position compensation when encoder available on the load.
Operating modes:
Position, speed and torque control
Path generator with trapezoidal and sinusoidal ramps
Profile Position Mode, Velocity Mode, Homing Mode
Interpolated position with linear (PT) and cubic splines (PVT)
Cyclic Synchronous Position (CSP)
Electronic gears (EGEAR) and cams (ECAM)
Motion contouring via position, speed, torque or voltage
Analogue external reference, pulse and direction
EasyMotion Studio-Software:
Graphic programming interface with many functions and wizards for simple commissioning, configuration and local programming of complex sequence programs in single-axis or multi-axis systems.
Enables the selection of motor type, encoder interface and control structure as well as the setting of protection and controller parameters.
Automatic determination of the PID controller parameters (autotuning).
Extended analysis and optimization tools integrated using the control panels, loggers and scope functionalities.
TML Library: The TML Motion Libraries can work under Windows (32-bit and 64-bit versions available), or Linux operating system and can be included in an application developed under C/C++, C#, Visual Basic, Delphi Pascal, or LabVIEW. TML_Lib is a collection of high-level functions allowing to control, from a PC, the Technosoft intelligent drives and motors. The protocol is TML and communication can take place via RS232, CAN bus, Ethernet or USB.
Technosoft Motion Language (TML) programming language: Using the TML language, different operating modes, movement profiles, reference runs or the control of complex sequence programs can be graphically programmed and executed autonomously. The drive controllers can process analog and digital I / O signals, perform arithmetic and logical operations, and also exchange data and commands between the axes. Single-axis and multi-axis stand-alone applications can be easily implemented with self-created sequence programs, even without the use of a complex CANopen or EtherCAT master controller.
MotionChip ™ technology: The main core of all Technosoft servo controllers is the MotionChip ™ - an intelligent, freely programmable motion controller specially designed for complex motion control tasks. The MotionChip ™ offers the possibility to use the powerful digital signal processors (DSP) from Texas Instruments as an independent, intelligent unit. As a result, many tasks of a complex master control are solved directly by the MotionChip ™, so that the global function of a machine is relieved and the management of a master application can be optimized. All-important control functions of a controller such as a multitude of operating modes, PLC properties, protection and safety functions as well as support for the different interface and motor technologies are accommodated on the MotionChip ™, thus enabling flexible use in a wide variety of drive systems.Intelligent, compact and freely programmable motor controller
For brushless, DC brush and step motors
Motor supply / logic supply: 7 – 30 VDC / 7 – 40 VDC
Output current: 0.9 A continuous / peak
Communication via RS232, TMLCAN and CANopen interfaces
Modular plug-in modules with very high integration density
For soldering / plugging in with pin headers with a pitch of 2 mm
Size (L x W x H): 46.5 x 19.2 x 8.5 mm- Analog Inputs:
- 1
- Supply Voltage:
- 12 V,24 V
- Communication:
- RS-232,CANopen / TMLCAN
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Digital Inputs:
- 5
- 2
- Digital Outputs:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Motion Control:
- 0.9 A
- Output Current - Nominal:
- Incremental,Digital Halls,Analog Halls,Tacho,Sensorless
- Sensors:
- 0.9/0.9 A
- Continuous/Peak Current:
-
iPOS2401 MX-CAN – Datasheet -
iPOS2401 MX-CAN – User manual
iPOS2401 MX-CAN – I/O board - EasyMotion Studio Demo
Motion Libraries
CANopen Programming Manual
EDS file for CANopen -
iPOS2401 MX-CAN – Connection diagram - Recommended products:
P020.002.E122 – Micro 4804 MZ-CAT 48V, 4 A, EtherCAT, plug-in
P020.002.E102 – Micro 4804 MZ-CAN 48V, 4 A, CAN, plug-in
P020.022.E122 – Micro 4804 LZ-CAT 48V, 4 A, EtherCAT, plug-in
P020.022.E102 – Micro 4804 LZ-CAN 48V, 4 A, CAN, plug-in
P034.001.E002 – EasyMotion Studio (software)