Technologie
Technosoft hat im Bereich der intelligenten Antriebsregler als kostengünstige Lösung für zahlreiche Applikationsanwendungen, Pionierarbeit geleistet.
Die Integration eines Motion-Controllers und eines Servoverstärkers in einer Einheit hat den intelligenten Antriebsregler von Technosoft vielseitig anwendbar gemacht. Mit der high-level Programmiersprache TML, können die intelligenten Antriebssteuerungen von Technosoft komplexe Funktionen ausführen wie zum Beispiel:
- Einstellung zahlreicher Steuer- und Betriebsarten.
- Steuerung komplexer Programmabläufe sowie, Sprünge, Abrufen von Funktionen, Interrupts, Verzögerungsschleifen, Sonderereignisse.
- Ausführung verschiedener Standard- und kundenspezifischen Referenzfahrten.
- Handling aller Ein- und Ausgänge.
- Ausführung von arithmetischen und logischen Operationen.
- Setzen eines der Antriebsregler als übergeordneter „Master“, der weitere Regler als „Slaves“ befiehlt und steuert.
- Kommunikation mit Befehl- und Datenübertragung zwischen den Achsen.
- Synchronisation der Regelkreise zwischen den Achsen.
Der nächste Schritt in der Entwicklung war die Realisierung eines intelligenten Kompaktantriebs, der Steuerungselektronik, Motor und Singleturn-Absolut-Encoder in einer Einheit vereint. Die Bewegungsbefehle werden über Datenleitungen gesendet und vom Antrieb direkt ausgeführt.

Schema eines intelligenten Antriebs
Schematische Darstellung einer intelligenten Steuerung

Schema eines intelligenten Antriebs
Schematische Darstellung eines intelligenten Antriebs
Das Konzept des MotionChip™
MotionChip™ ist ein fortschrittlicher, leistungsstarker und einsatzbereite Motion-Controller, der auf der Basis dedizierter Prozessoren entwickelt wurde. Durch die Verwendung von 8 PWM-Steuersignalen kann der MotionChip™ eine oder zwei H-Brücken oder einen 3-Phasen-Wechselrichter steuern und bietet somit eine Ein-Chip-Lösung zur Steuerung von bürstenlosen und bürstenbehafteten Gleichstrommotoren sowie 2- oder 3-Phasen-Schrittmotoren.
Zu den Betriebsmodi gehören Drehmoment-, Drehzahl- und Positionssteuerung mit verschiedenen Kommutierungsmethoden wie Trapez (DC-Modus, Hall-basiert) oder Sinus (AC-Modus, Encoder-basierte Vektorsteuerung) von bürstenlose Motoren und offener Regelkreis mit Mikroschrittbetrieb oder geschlossener Regelkreis (Vektorsteuerung) von Schrittmotoren.
Der integrierte MotionChip™-Controller verfügt über eine äußerst flexible Hochsprache für die Programmierung komplexer Bewegungsroutinen – die Technosoft Motion Language (TML). Dank des leistungsstarken TML-Befehlssatzes können komplexe Bewegungsabläufe direkt auf Antriebsebene programmiert werden, sodass in vielen Fällen keine übergeordnete Master-Steuerung erforderlich ist.
Eigenschaften
- Steuerung aller Arten von Motoren wie DC, BLDC, PMSM und Schrittmotoren.
- Einfache Programmierung der Anwendung mit der Hochsprache TML.
- Verschiedene Betriebsmodi: Drehmoment-, Drehzahl- und Positionssteuerung.
- Ein- oder Mehrachs-Anwendungen in einer Standalone oder Master/Slave-Betrieb.
- Mehrere Feedback Optionen: Sin/Cos und Quad-Inkrementalgeber, digitale und lineare Hallsensoren, Tachogeneratoren, Absolutwertgeber und Resolver.
- Mehrere Kommunikationskanäle: RS232, CAN, Ethernet, EtherCAT.

ZxZx
Vorteile der Technosoft Motion Technologie
- Kompakte und kosteneffiziente Antriebslösungen.
- Alles in Einem: Motion-Controller und Servoregler in einer Einheit.
- Eines für alles: Eine Steuerung für DC-, BLDC / PMSM- und Schrittmotoren.
- Kommunikation über RS232, TMLCAN, CANopen, EtherCAT oder Ethernet.
- Dezentral einsetzbar dank freier Programmierbarkeit auf lokaler Ebene über die performante und sehr flexible TML-Programmiersprache.
- Erweiterte Motion-Control-Funktionen, einschließlich kubische Splines (PVT), Sinusrampen, elektronische Kurvenscheiben und 3D-Bewegungsprofile.
- Einfache Ansteuerung von SPS, PC oder Mikrocontroller über verschiedene Funktionsbibliotheken (C/C++, C#, Visual Basic, Delphi, LabVIEW, Linux etc).
- Einfache und intuitive grafische Programmierung mit EasyMotion Studio.

TMLCAN. CANopen. EtherCAT
Technosoft-Produkte, die mit einer CAN-Schnittstelle ausgestattet sind, verfügen über zwei Betriebsoptionen bzw. Protokolle: TMLCAN und CANopen.
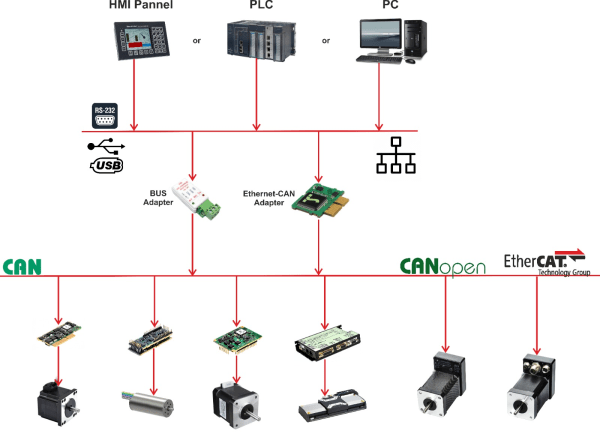
Im Betriebsmodus TMLCAN können die iPOS-Antriebsregler und iMOT-Motoren als intelligente Teilnehmer betrieben werden. Jede der Achsen kann vorgespeicherte Bewegungsabläufe eigenständig ausführen und gleichzeitig TML-Befehle und -Daten an andere Achsen senden. Jede der Achsen kann die Rolle einer übergeordneten Steuerung übernehmen, um sowohl die Kommunikation als auch die Synchronisation zwischen den Achsen zu koordinieren. Wenn ein übergeordnetes System (z.B. ein PC) erforderlich ist, kann die Kommunikation über RS232, USB, Ethernet oder direkt über den CAN-Bus erfolgen. Wenn eine serielle RS232-Schnittstelle verfügbar ist, dann reicht diese aus, um mit allen im CAN-Bus angeschlossenen Achsen zu kommunizieren. Jede der Achsen kann als „Kommunikationsrelais“ fungieren und die RS232-Befehle automatisch an die anderen im CAN-Bus angeschlossenen Achsen weiterleiten. Wenn Sie flexibel sein und das volle Potenzial der Technosoft-Antriebsregler und -Motoren nutzen möchten, ist TMLCAN das empfohlene Protokoll und die TML Motion Library das richtige Softwaretool.
Im Betriebsmodus CANopen werden die Technosoft-Antriebsregler und -Motoren als CANopen-Slaves gemäß den CiA-Profilen 301, 305 und 402 gesteuert. In dieser Betriebsart ist ein externer CANopen-Master erforderlich, der die gesamte Anwendung steuert.
Die Technosoft-Achsen können auch unter CANopen weiterhin untereinander kommunizieren und komplexe Bewegungsroutinen wie Funktionen oder Referenzläufe autonom ausführen, wenn diese vom CANopen-Master aufgerufen werden. Dieser dezentrale Ansatz, bei dem der CANopen-Master vorprogrammierte Bewegungsprofile aufruft, reduziert die Kommunikation und den Gesamtaufwand des Masters erheblich und trägt dazu bei effizientere und kostengünstige Lösungen zu realisieren.
Die neuen Produktreihen iPOS und iMOT enthalten beide TMLCAN und CANopen Optionen. Je nach Produkt erfolgt die Auswahl mit einem DIP-Schalter oder einem digitalen oder analogen Eingang, der den einen oder anderen Modus aktiviert.
Technosoft-Produkte mit einer EtherCAT-Schnittstelle arbeiten als Standard-EtherCAT-Slaves, die dem CANopen over EtherCAT (CoE) -Protokoll entsprechen. Auch hier hat der EtherCAT-Master die Möglichkeit, gespeicherte TML-Programme von den untergeordneten Controllern aufzurufen und auszuführen.
TML: Technosoft Motion Programmierung Sprache
Ein entscheidender Vorteil der Technosoft intelligenten Steuerungen und Motoren ist ihre Fähigkeit, komplexe Bewegungen auszuführen, ohne dass ein externer Motion-Controller erforderlich ist. Das ist möglich weil Technosoft Steuerungen in einer kompakten Einheit sowohl den Motion-Controller wie auch die Endstufe vereint. Es gibt folgende Möglichkeiten eine Bewegungsanwendung zu implementieren:
- Als autonome Bewegungsroutinen, in TML geschrieben und im nichtflüchtigen Speicher des Reglers gespeichert;
- Als Programmabläufe in einer übergeordneter Zentraleinheit, implementiert mithilfe der TML_LIB motion Bibliotheken für PC oder PLC. In diesem Fall werden die TML-Befehle einzeln über einen Kommunikationskanal an die Steuerungen gesendet.
- Als dezentraler Steuerungsansatz, welches die ersten zwei Möglichkeiten kombiniert, z. B. ein Host (PC, SPS oder µController), der TML-Befehle sendet und Funktionen aufruft, die in den intelligenten Steuerungen / Motoren vorprogrammiert sind.
TML (Technosoft Motion Language) ist eine höhere Programmiersprache, mit der komplexe Bewegungsprofile auf den intelligenten Steuerungen und Motoren von Technosoft programmiert werden können. TML bietet folgende Möglichkeiten:
- Einstellen von verschiedenen Betriebsmodi: Positions- oder Geschwindigkeitsprofile, PVT- oder PT-Interpolation, elektronisches Getriebe oder Nocken, externe Referenz usw.
- Ändern der Bewegungsarten und/oder aller Steuer- und Reglerparameter während des Ablaufs.
- Ausführen von Standard- und kundenspezifischen Referenzfahrten.
- Steuerung des Programmflusses durch:
- bedingte Sprünge und Funktionsaufrufe.
- programmierte Unterbrechungen (Triggern von Schutzfunktionen, Betätigung der Endschalter, Erfassen von Eingängen, usw.).
- Warten auf programmierte Ereignisse.
- Bearbeiten von digitalen E/A und analogen Eingängen.
- Ausführen von arithmetischen und logischen Operationen.
- Durchführen von Datenübertragungen zwischen den Achsen.
- Steuerung einer Achse von einer anderen Achse.
- Senden von Befehlen an eine Achsengruppe (Multicast) einschließlich des gleichzeitigen Starten von Bewegungen für alle Achsen in einer Gruppe.
- Synchronisieren aller Achsen in einem Netztwerk.
In einer komplexen Mehrachsenanwendung ermöglicht die Verwendung von TML die Verteilung der Intelligenz zwischen der übergeordneten Master-Steuerung und den intelligenten Steuerungen und Motoren von Technosoft. Anstatt zu versuchen, jeden Ablaufschritt einer Achsenbewegung von einem Master-Controller aus zu steuern, kann man die intelligenten Steuerungen so programmieren, dass sie diese sich wiederholenden Bewegungsaufgaben selbst ausführen und den Master informieren, wenn diese Aufgaben abgeschlossen sind. Demnach reduziert sich die Aufgabe des Masters auf das Abrufen der entsprechenden TML Funktionen. Wenn erwünscht, kann man die intelligenten Steuerungen und Motoren programmieren um periodisch (oder ereignisgesteuert) Daten an dem Master zu schicken zwecks Überwachung der Abläufe.
Aufgrund des leistungsstarken Befehlssatzes ist das Programmieren einer Bewegung mit TML auch für komplexe Anwendungen sehr schnell und einfach. Das so entstandene Programm arbeitet selbstständig und kann auch für andere Applikationen oder Projekte angewandt werden.
Die TML Programmierung wird einfach mit der Bedienoberfläche EasyMotion Studio durchgeführt. Ein Konfigurationsassistent erlaubt mittels eines Dialogs die Anwendung graphisch darzustellen. Die dazugehörigen TML Befehle werden automatisch hinzugefügt.