Technosoft servo drives and intelligent motors can communicate via the RS-232 protocol. This is a point-to-point, full duplex communication, allowing simultaneous transmission in both directions.
The Technosoft drives and motors communicate serially using 8 data bits, 2 stop bits, no parity at the following baud rates: 9600 bps (default, after power ON or reset), 19200 bps, 38400 bps, 56600 bps and 115200 bps.
The TML instructions can be automatically converted to binary code using the Binary Code Viewer tool, included in the EasyMotion Studio II software (start EasyMotion Studio II and use the menu command Tools | Binary Code Viewer to open the Binary Code Viewer tool).
The Binary Code Viewer tool offers a quick way to program an RS232 host for exchanging messages with a Technosoft drives / motors. Through this tool can be found how to encapsulate a TML command for all the communication types and the supported protocols. Binary Code Viewer returns the contents of the messages that needs to be sent and the expected answers from the drive/motor, if it is the case.
For example purpose this article presents how to start a basic trapezoidal position profile using the RealTerm terminal, a free software that can be downloaded form one of the following links: http://realterm.sourceforge.net/ or https://sourceforge.net/projects/realterm/.
The TML code can be generated in Motion part of EasyMotion Studio II, using the motion wizard and then copied to clipboard with right mouse click and the Copy to Clipboard option in the context menu.
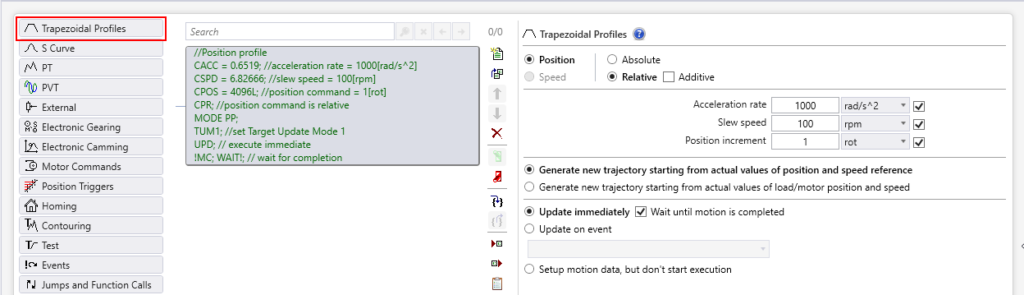
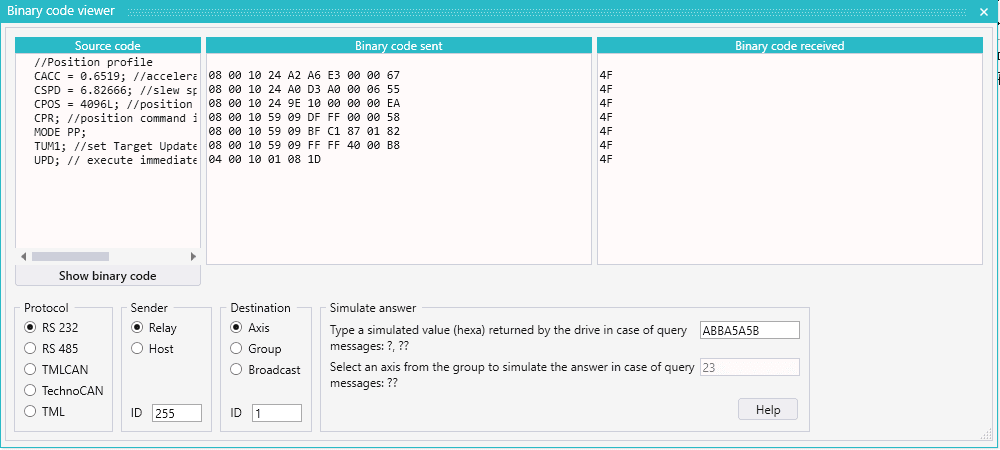
In the Binary Code Viewer the following steps must be done:
– fill the Source Code field with the TML instruction to be sent;
– select at Protocol: RS 232;
– set the Sender axis ID. For RS232 the host axis ID is identical with the drive axis ID;
– set the Destination axis ID of the drive;
– press the „>“ button to generate the RS232 message contents.
Remark: Details about TML instructions encapsulation, the RS232 messages and some examples can be found in the Help topics form EasyMotion Studio II (Help | Help Topics | Communication | Protocols -> „Serial communication. RS-232 and RS-485 protocols.“).
Before sending the RS232 messages, the RealTerm terminal must be configured, according to Technosoft RS232 protocol. This involves the following 2 steps:.
Step 1 – Display settings

Step 2 – Port settings
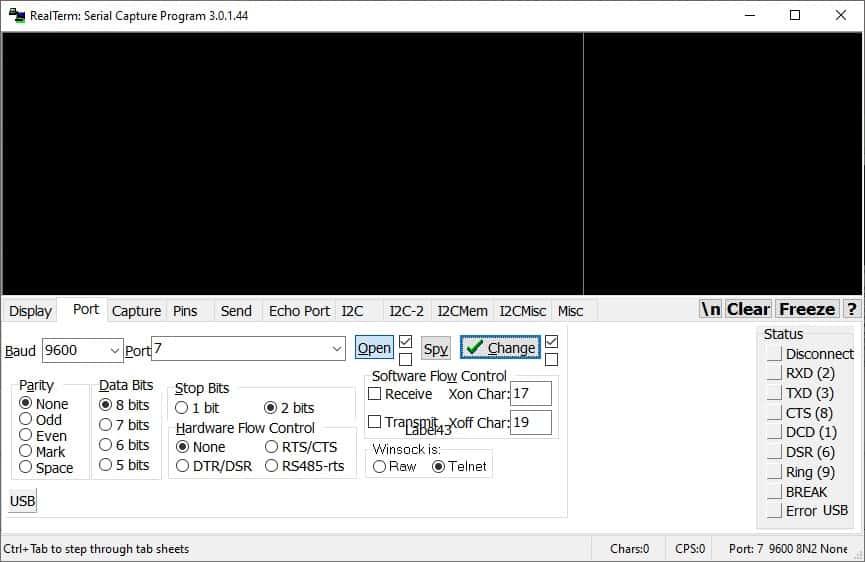
The RS-232 messages can be send from the „Send“ tab in RealTerm.
Once the binary code is filled, it can be sent to the drive by pressing the “as HEX” button.
The example below sends the „08 00 10 24 A2 08 26 00 0C“ message, that is the corresponding binary code for the „CACC = 0.03183;“ TML instruction.

If the code is successfully sent, a „4F“ message will be replayed by the drive.
If the host doesn’t receive any acknowledge byte for at least 2 ms after the end of the checksum byte transmission, this means that at some point during the last message transmission, one byte was lost and the synchronization between the host and the relay axis is gone. In this case the master must restore the synchronization.