- « Back to Catalog
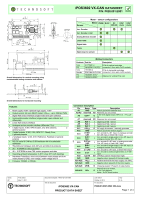
iPOS3604 VX-CAN 9-36V 4A 144W CANopen/EtherCAT

• Universalregler für DC-Motoren, BLDC-Motoren und Schrittmotoren
• Modulare PCIe-Einsteckkarte mit sehr hoher Integrationsdichte
• Komplettlösung mit Endstufe und Motion-Controller in einer Einheit
• Flexible Integration auf ein- oder mehrachsigen Motherboards
• Dezentral einsetzbar dank freier Programmierbarkeit auf lokaler Ebene
• Leistungsdaten: 9-36 VDC; 4 A Dauer-, 10 A Spitzenstrom
• Schnittstellen: RS232, CAN/CANopen (standard); EtherCAT (optional)
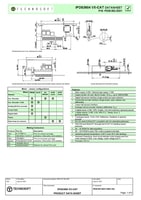
• Kompakte Abmessungen (L x B x H): 56 x 28.8 x 7.6 mm
- ^
Intelligente Ansteuerung von DC-Motoren, PMSM / BLDC-Motoren und Schrittmotoren mit sehr hoher Integrationsdichte im PCIe-Steckkartenformat. Der iPOS3604 ist ein sehr kompakter, frei programmierbarer Servoregler mit integrierter Endstufe, MotionChip™-Controller, E/A-Signale und CAN-Bus Schnittstelle in einer Einheit. Der iPOS3604 ist als PCIe-Steckmodul für die Integration auf einer Trägerplatine konzipiert und ermöglicht eine einfache Integration auch unter beengten Platzverhältnissen. Mehrere VX-Modulen können auf einer einzigen Hauptplatine gesteckt werden, was letztendlich zu einem kompakten Design, Zeitersparniss und Kostenoptimierung führt.
Leistungsdaten:
Versorgungsspannung für Logik / Leistung: 9-36 VDC
Ausgangsstrom: 4 A Dauer-, 10 A Spitzenstrom
Motortypen:
Bürstenlose Gleichstrommotoren (BLDC-, PMSM-Motoren)
Bürstenbehaftete Gleichstrommotoren (DC-Motoren)
Direktantriebe (Linear- und Torquemotoren)
Voice Coil Aktuatoren (Tauchspulen)
Schrittmotoren (2- oder 3-phasige)
Feedbackmöglichkeiten:
Inkrementalgeber
SinCos 1Vss
Digitale Hallsensoren
Analoge Hallsensoren
Absolutwertgeber (optional)
Ansteuerung:
Über Feldbus, Takt/Richtung oder Analog-/Digitaleingänge.
Standalone durch autonome Ausführung komplexer Bewegungsabläufe direkt aus dem nichtflüchtigen Speicher des Controllers.
Kommunikation:
RS232 – bis zu 115 k
CANopen – gemäß den CiA-Profilen 301, 305 und 402
TMLCAN – Technosofts proprietäres CAN Protokoll
EtherNet – optional über ein Zusatzmodul
EtherCAT (CoE) – optional über ein Zusatzmodul
Digitale und analoge Ein-/Ausgänge:
5 digitale Eingänge: 5-36 V, NPN
4 digitale Ausgänge: 5-36 V, 0,5 A, NPN Open-Collector
2 analoge Eingänge: 12 Bit, 0-5 V
Ausgangssignal zur Ansteuerung einer externen Motor-/Haltebremse.
Integrierte Bremschopperfunktion zur Steuerung eines externen Bremswiderstands.
Sicherheit: Schutzeinrichtungen gegen Überstrom, Unter- und Überspannung, Kurzschluss, I2t, Schleppfehler und Strombegrenzung
Regeleigenschaften:
Sinuskommutierung mit feldorientierte Regelung (FOC) über Encoder, Hallsensoren oder Sensorlos.
Schnelle und hochpräzise kaskadierte Regelkreise mit frei einstellbaren Abtastraten und PWM-Schaltfrequenz bis 100 kHz
Hervorragende Resonanz- und Schwingungsunterdrückung durch den gleichzeitigen Einsatz von bis zu 2 Notch-, Tiefpass-, Hochpass- oder Bandpassfiltern.
Steuerung von Schrittmotoren im closed-loop (FOC) oder im open-loop mit 1/512-µSchritt, Schrittverlusterkennung und automatischer Positionsausgleich.
Betriebsmodis:
Positions- ,Drehzahl- und Drehmomentregelung
Pfadgenerator mit Trapez- und Sinusrampen
Profile Position Mode, Velocity Mode, Homing Mode
Interpolated Position mit lineare (PT) und kubische Splines (PVT)
Cyclic Synchronous Position (CSP), Velocity (CSV), Torque (CST)
Elektronische Getriebe (EGEAR) und Kurvenscheiben (ECAM)
Motion-Contouring über Position, Geschwindigkeit, Drehmoment oder Spannung
Analoge Kommandierung, Takt/Richtung
EasyMotion Studio-Software:
Grafische Programmieroberfläche mit vielen Funktionen und Wizards für die einfache Inbetriebnahme, Konfiguration und lokale Programmierung komplexer Ablaufprogrammen auf Einachs- oder Mehrachssysteme.
Ermöglicht die Auswahl von Motortechnologie, Encoder-Schnittstelle und Steuerungsstruktur sowie die Einstellung von Schutz- und Reglerparameter.
Erweiterte Analyse- und Optimierungs-Tools über die vorhandenen Control-Panels, Logger und Scopefunktionalität.
Automatische Ermittlung der PID-Reglerparameter (Autotuning).
TML Bibliotheken: Zur Anbindung an PCs, SPS und µController verfügt Technosoft über verschiedene Bibliotheken – beispielsweise für Linux, Delphi, Visual Basic, C++, C# oder LabView. Mit ihrer Hilfe können die Technosoft-Antriebsregler in vorhandene Systeme ohne Probleme eingebunden werden. Das Protokoll ist TML und die Kommunikation kann über RS232, CAN-Bus, Ethernet oder USB erfolgen.
Technosoft Motion Language (TML): Über die sehr flexible TML-Programmiersprache lassen sich verschiedene Betriebsarten, Bewegungsprofile, Referenzfahrten oder die Steuerung von komplexen Ablaufprogrammen graphisch programmieren und autonom aus dem nichtflüchtigen Speicher des Controllers ausführen. Die Antriebsregler können analoge und digitale E/A Signale verarbeiten, arithmetische und logische Operationen berechnen, Sprung- und Funktionsaufrufe, Ereignisse und Interrupt Routinen (ISR) ausführen sowie auch Daten und Befehle zwischen den Achsen austauschen. Einachs- und Mehrachs-Stand-Alone-Anwendungen lassen sich mit selbsterstellten Ablaufprogrammen einfach realisieren, auch ohne den Einsatz einer komplexen CANopen- oder EtherCAT-Mastersteuerung.
MotionChip™ Technologie: Hauptkern aller Technsoft Servoregler ist der MotionChip™ – ein intelligenter frei programmierbar Controller speziell für komplexe Motion-Control-Aufgaben konzipiert. Der MotionChip™ bietet die Möglichkeit, den leistungsstarken digitaler Signalprozessor (DSP) von Texas Instruments als unabhängige, intelligente Einheit einzusetzen. Dadurch werden viele Aufgaben einer komplexen Mastersteuerung direkt vom dem MotionChip™ gelöst, sodass die globale Funktion einer Maschine entlastet und damit das Management einer Master-Applikation gut optimiert werden kann. Alle wichtigen Steuerungs-Funktionen eines Reglers wie etwa eine Vielzahl von Betriebsmodi, SPS-Eigenschaften, Schutz- und Sicherheitsfunktionen sowie auch Support für die unterschiedliche Schnittstellen- und Motortechnologien sind auf dem MotionChip™ untergebracht, und ermöglichen somit einen flexiblen Einsatz in den verschiedensten Antriebssystemen. - Supply Voltage:
- 12 V,24 V,36 V
- Output Current - Nominal:
- 4 A
- Continuous/Peak Current:
- 4/10 A
- Communication:
- RS-232,CANopen / TMLCAN,EtherCAT
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Sensors:
- Incremental,1Vpp Sin/Cos,Digital Halls,Analog Halls,Tacho,Sensorless
- Motion Control:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Digital Inputs:
- 5
- Digital Outputs:
- 4
- Analog Inputs:
- 2
-

iPOS3604 VX-CAN – Datenblätter
iPOS3604 VX-CAT – Datenblätter -

iPOS3604VX
iPOS3604 VX-CAN/CAT – I/O Board - EasyMotion Studio Demo
TML Motion Bibliotheken
CANopen EDS-Datei
EtherCAT (CoE) Handbuch
EtherCAT ESI XML-Datei -


iPOS3604 VX-CAN – Anschlusspläne

iPOS3604 VX-CAT – Anschlusspläne - P028.002.E001 – iPOS3604 VX-CAN (36V, 4A, encoder, CAN)
P028.002.E801 – iPOS3604 VX-CAN starter kit, brushless motor
P028.002.E021 – iPOS3604 VX-CAT (36V, 4A, encoder, EtherCAT compatible)
P028.002.E811 – iPOS3604 VX-CAT starter kit, brushless motor
P034.001.E002 – EasyMotion Studio (software)
iPOS3604 VX-CAN 9-36V 4A 144W CANopen/EtherCAT
- ^
Intelligente Ansteuerung von DC-Motoren, PMSM / BLDC-Motoren und Schrittmotoren mit sehr hoher Integrationsdichte im PCIe-Steckkartenformat. Der iPOS3604 ist ein sehr kompakter, frei programmierbarer Servoregler mit integrierter Endstufe, MotionChip™-Controller, E/A-Signale und CAN-Bus Schnittstelle in einer Einheit. Der iPOS3604 ist als PCIe-Steckmodul für die Integration auf einer Trägerplatine konzipiert und ermöglicht eine einfache Integration auch unter beengten Platzverhältnissen. Mehrere VX-Modulen können auf einer einzigen Hauptplatine gesteckt werden, was letztendlich zu einem kompakten Design, Zeitersparniss und Kostenoptimierung führt.
Leistungsdaten:
Versorgungsspannung für Logik / Leistung: 9-36 VDC
Ausgangsstrom: 4 A Dauer-, 10 A Spitzenstrom
Motortypen:
Bürstenlose Gleichstrommotoren (BLDC-, PMSM-Motoren)
Bürstenbehaftete Gleichstrommotoren (DC-Motoren)
Direktantriebe (Linear- und Torquemotoren)
Voice Coil Aktuatoren (Tauchspulen)
Schrittmotoren (2- oder 3-phasige)
Feedbackmöglichkeiten:
Inkrementalgeber
SinCos 1Vss
Digitale Hallsensoren
Analoge Hallsensoren
Absolutwertgeber (optional)
Ansteuerung:
Über Feldbus, Takt/Richtung oder Analog-/Digitaleingänge.
Standalone durch autonome Ausführung komplexer Bewegungsabläufe direkt aus dem nichtflüchtigen Speicher des Controllers.
Kommunikation:
RS232 – bis zu 115 k
CANopen – gemäß den CiA-Profilen 301, 305 und 402
TMLCAN – Technosofts proprietäres CAN Protokoll
EtherNet – optional über ein Zusatzmodul
EtherCAT (CoE) – optional über ein Zusatzmodul
Digitale und analoge Ein-/Ausgänge:
5 digitale Eingänge: 5-36 V, NPN
4 digitale Ausgänge: 5-36 V, 0,5 A, NPN Open-Collector
2 analoge Eingänge: 12 Bit, 0-5 V
Ausgangssignal zur Ansteuerung einer externen Motor-/Haltebremse.
Integrierte Bremschopperfunktion zur Steuerung eines externen Bremswiderstands.
Sicherheit: Schutzeinrichtungen gegen Überstrom, Unter- und Überspannung, Kurzschluss, I2t, Schleppfehler und Strombegrenzung
Regeleigenschaften:
Sinuskommutierung mit feldorientierte Regelung (FOC) über Encoder, Hallsensoren oder Sensorlos.
Schnelle und hochpräzise kaskadierte Regelkreise mit frei einstellbaren Abtastraten und PWM-Schaltfrequenz bis 100 kHz
Hervorragende Resonanz- und Schwingungsunterdrückung durch den gleichzeitigen Einsatz von bis zu 2 Notch-, Tiefpass-, Hochpass- oder Bandpassfiltern.
Steuerung von Schrittmotoren im closed-loop (FOC) oder im open-loop mit 1/512-µSchritt, Schrittverlusterkennung und automatischer Positionsausgleich.
Betriebsmodis:
Positions- ,Drehzahl- und Drehmomentregelung
Pfadgenerator mit Trapez- und Sinusrampen
Profile Position Mode, Velocity Mode, Homing Mode
Interpolated Position mit lineare (PT) und kubische Splines (PVT)
Cyclic Synchronous Position (CSP), Velocity (CSV), Torque (CST)
Elektronische Getriebe (EGEAR) und Kurvenscheiben (ECAM)
Motion-Contouring über Position, Geschwindigkeit, Drehmoment oder Spannung
Analoge Kommandierung, Takt/Richtung
EasyMotion Studio-Software:
Grafische Programmieroberfläche mit vielen Funktionen und Wizards für die einfache Inbetriebnahme, Konfiguration und lokale Programmierung komplexer Ablaufprogrammen auf Einachs- oder Mehrachssysteme.
Ermöglicht die Auswahl von Motortechnologie, Encoder-Schnittstelle und Steuerungsstruktur sowie die Einstellung von Schutz- und Reglerparameter.
Erweiterte Analyse- und Optimierungs-Tools über die vorhandenen Control-Panels, Logger und Scopefunktionalität.
Automatische Ermittlung der PID-Reglerparameter (Autotuning).
TML Bibliotheken: Zur Anbindung an PCs, SPS und µController verfügt Technosoft über verschiedene Bibliotheken – beispielsweise für Linux, Delphi, Visual Basic, C++, C# oder LabView. Mit ihrer Hilfe können die Technosoft-Antriebsregler in vorhandene Systeme ohne Probleme eingebunden werden. Das Protokoll ist TML und die Kommunikation kann über RS232, CAN-Bus, Ethernet oder USB erfolgen.
Technosoft Motion Language (TML): Über die sehr flexible TML-Programmiersprache lassen sich verschiedene Betriebsarten, Bewegungsprofile, Referenzfahrten oder die Steuerung von komplexen Ablaufprogrammen graphisch programmieren und autonom aus dem nichtflüchtigen Speicher des Controllers ausführen. Die Antriebsregler können analoge und digitale E/A Signale verarbeiten, arithmetische und logische Operationen berechnen, Sprung- und Funktionsaufrufe, Ereignisse und Interrupt Routinen (ISR) ausführen sowie auch Daten und Befehle zwischen den Achsen austauschen. Einachs- und Mehrachs-Stand-Alone-Anwendungen lassen sich mit selbsterstellten Ablaufprogrammen einfach realisieren, auch ohne den Einsatz einer komplexen CANopen- oder EtherCAT-Mastersteuerung.
MotionChip™ Technologie: Hauptkern aller Technsoft Servoregler ist der MotionChip™ – ein intelligenter frei programmierbar Controller speziell für komplexe Motion-Control-Aufgaben konzipiert. Der MotionChip™ bietet die Möglichkeit, den leistungsstarken digitaler Signalprozessor (DSP) von Texas Instruments als unabhängige, intelligente Einheit einzusetzen. Dadurch werden viele Aufgaben einer komplexen Mastersteuerung direkt vom dem MotionChip™ gelöst, sodass die globale Funktion einer Maschine entlastet und damit das Management einer Master-Applikation gut optimiert werden kann. Alle wichtigen Steuerungs-Funktionen eines Reglers wie etwa eine Vielzahl von Betriebsmodi, SPS-Eigenschaften, Schutz- und Sicherheitsfunktionen sowie auch Support für die unterschiedliche Schnittstellen- und Motortechnologien sind auf dem MotionChip™ untergebracht, und ermöglichen somit einen flexiblen Einsatz in den verschiedensten Antriebssystemen. • Universalregler für DC-Motoren, BLDC-Motoren und Schrittmotoren
• Modulare PCIe-Einsteckkarte mit sehr hoher Integrationsdichte
• Komplettlösung mit Endstufe und Motion-Controller in einer Einheit
• Flexible Integration auf ein- oder mehrachsigen Motherboards
• Dezentral einsetzbar dank freier Programmierbarkeit auf lokaler Ebene
• Leistungsdaten: 9-36 VDC; 4 A Dauer-, 10 A Spitzenstrom
• Schnittstellen: RS232, CAN/CANopen (standard); EtherCAT (optional)
• Kompakte Abmessungen (L x B x H): 56 x 28.8 x 7.6 mm- Analog Inputs:
- 2
- Supply Voltage:
- 12 V,24 V,36 V
- Communication:
- RS-232,CANopen / TMLCAN,EtherCAT
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Digital Inputs:
- 5
- 4
- Digital Outputs:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Motion Control:
- 4 A
- Output Current - Nominal:
- Incremental,1Vpp Sin/Cos,Digital Halls,Analog Halls,Tacho,Sensorless
- Sensors:
- 4/10 A
- Continuous/Peak Current:
-
iPOS3604 VX-CAN – Datenblätter
iPOS3604 VX-CAT – Datenblätter -
iPOS3604VX
iPOS3604 VX-CAN/CAT – I/O Board - EasyMotion Studio Demo
TML Motion Bibliotheken
CANopen EDS-Datei
EtherCAT (CoE) Handbuch
EtherCAT ESI XML-Datei -
iPOS3604 VX-CAN – Anschlusspläne
iPOS3604 VX-CAT – Anschlusspläne - P028.002.E001 – iPOS3604 VX-CAN (36V, 4A, encoder, CAN)
P028.002.E801 – iPOS3604 VX-CAN starter kit, brushless motor
P028.002.E021 – iPOS3604 VX-CAT (36V, 4A, encoder, EtherCAT compatible)
P028.002.E811 – iPOS3604 VX-CAT starter kit, brushless motor
P034.001.E002 – EasyMotion Studio (software)
Hauptkern aller Technsoft Steuerungen ist der MotionChip™ – ein intelligenter frei programmierbar Controller speziell für komplexe Motion-Control-Aufgaben konzipiert. Der MotionChip™ bietet die Möglichkeit, den leistungsstarken digitaler Signalprozessor (DSP) von Texas Instruments als unabhängige, intelligente Einheit einzusetzen. Dadurch werden viele Aufgaben einer komplexen Mastersteuerung direkt vom dem MotionChip™ gelöst, sodass die globale Funktion einer Maschine entlastet und damit das Management einer Master-Applikation gut optimiert werden kann.
Der MotionChip™ ist als eigenständiger Controller oder im Rahmen eines Mehrachsensystems auf Echtzeit-Netzwerkbasis einsetzbar. Er kann für verschiedene Kommunikations-Arten eingerichtet werden und basiert hauptsächlich auf Netzwerkstandards wie RS232, CAN/CANopen und EtherCAT.
Alle wichtigen Steuerungs-Funktionen eines Reglers wie etwa eine Vielzahl von Betriebsmodi, unterschiedliche Schnittstellen zur Kommandierung sowie auch SPS-Eigenschaften sind auf dem MotionChip™ untergebracht, und ermöglichen einen flexiblen Einsatz in den verschiedensten Antriebssystemen.
Komplexen Programmabläufe, Homing Prozeduren, Regelalgorithmen und Berechnungen für ganze Ein- oder Mehrachssysteme können graphisch programmiert und autark auf dem MotionChip™ abgearbeitet werden, womit eine übergeordnete Mastersteuerung entfällt.