- « Back to Catalog
iMOT172S TM-CAT 12-48V 300 mNm Schrittmotor EtherCAT
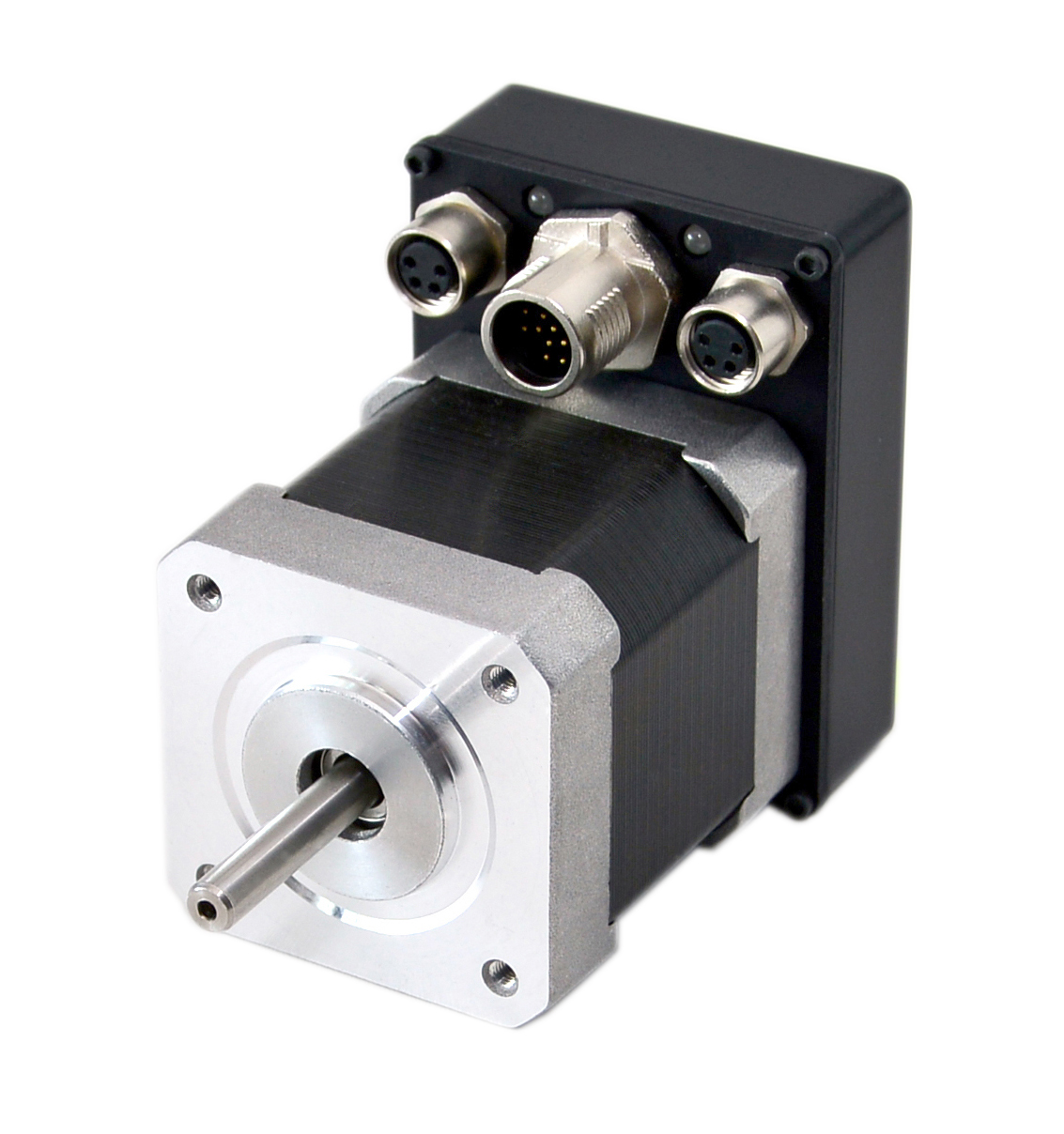
• Intelligenter Kompaktantrieb in 42 mm Baugröße (NEMA 17)
• Schrittmotor mit integriertem frei programmierbarem Servoregler
• Hohe Dynamik und Effizienz durch feldorientierte Regelung (FOC)
• Betriebsspannung: 12 – 48 V / Nenndrehmoment: 300 mNm
• Magnetischer Singleturn-Absolut-Encoder mit 4096 I/Udr. (12 bit)
• Schnittstelle: EtherCAT, RS232
• Steckverbindersystem: M8/M12
Schrittmotor mit integrierter, frei programmierbarer Regelungselektronik, Absolutencoder und EtherCAT-Schnittstelle. Durch die integrierte Steuerung wird der Verkabelungsaufwand auf die Kommunikationsverbindung und die Stromversorgung reduziert und die elektromagnetische Verträglichkeit deutlich verbessert. Das äußerst kompakte Antrieb ist bereits optimal ausgelegt, sofort betriebsbereit und ermöglicht somit eine einfache Integration auf engstem Raum.
Leistungsdaten:
Betriebsspannung: 12 – 48 VDC / Nennstrom: 3 A
Nenndrehmoment: 300 mNm @ 1200 UpM
Leerlaufdrehzahl: 1700 UpM @ 48 VDC
Kommunikation:
RS232 – bis zu 115 k
EtherCAT – mit CANopen over EtherCAT (CoE) Protokoll
Digitale und analoge Ein-/Ausgänge:
4 digitale Eingänge: 5-24 V, NPN oder PNP konfigurierbar
2 digitale Ausgänge: 24 V, 0.5 A, NPN Open-Collector
1 analoger Eingang: 12 Bit, 0-5 V
Feedback: Integrierter magnetischer Singleturn-Absolut-Encoder mit einer Auflösung von 4096 Inkremente pro Umdrehung (12 bit).
Sicherheit: Programmierbare Schutzeinrichtungen gegen Überstrom, Übertemperatur, Unter- und Überspannung, I2t und Schleppfehler.
Ansteuerung:
über Feldbus oder Analog-/Digitaleingänge.
Standalone durch autonome Ausführung komplexer Bewegungsabläufe direkt aus dem nichtflüchtigen Speicher des integrierten Controllers.
Steuermodis:
Closed-Loop mit Sinuskommutierung und feldorientierter Regelung (FOC) für hohe Dynamik, Laufruhe und Effizienz.
Open-Loop mit bis zu 512 Mikroschritte pro Vollschritt, Schrittverlusterkennung und automatischer Positionsausgleich.
Betriebsmodis:
Positions- ,Drehzahl- und Drehmomentregelung
Pfadgenerator mit Trapez- und Sinusrampen
Profile Position Mode, Velocity Mode, Homing Mode
Interpolated Position mit lineare (PT) und kubische Splines (PVT)
Cyclic Synchronous Position (CSP), Velocity (CSV), Torque (CST)
Elektronische Getriebe (EGEAR) und Kurvenscheiben (ECAM)
Motion-Contouring über Position, Geschwindigkeit, Drehmoment oder Spannung
Analoge Kommandierung, Takt/Richtung
EasyMotion Studio-Software:
Grafische Programmieroberfläche mit vielen Funktionen und Wizards für die einfache Inbetriebnahme, Konfiguration und lokale Programmierung komplexer Ablaufprogrammen auf Einachs- oder Mehrachssysteme.
Ermöglicht die Auswahl von Motortechnologie, Encoder-Schnittstelle und Steuerungsstruktur sowie die Einstellung von Schutz- und Reglerparameter.
Erweiterte Analyse- und Optimierungs-Tools über die vorhandenen Control-Panels, Logger und Scopefunktionalität.
Automatische Ermittlung der PID-Reglerparameter (Autotuning).
Technosoft Motion Language (TML): Über die sehr flexible TML-Programmiersprache lassen sich verschiedene Betriebsarten, Bewegungsprofile, Referenzfahrten oder die Steuerung von komplexen Ablaufprogrammen graphisch programmieren und autonom aus dem nichtflüchtigen Speicher des Controllers ausführen. Die Antriebsregler können analoge und digitale E/A Signale verarbeiten, arithmetische und logische Operationen berechnen, Sprung- und Funktionsaufrufe, Ereignisse und Interrupt Routinen (ISR) ausführen sowie auch Daten und Befehle zwischen den Achsen austauschen. Einachs- und Mehrachs-Stand-Alone-Anwendungen lassen sich mit selbsterstellten Ablaufprogrammen einfach realisieren, auch ohne den Einsatz einer komplexen CANopen- oder EtherCAT-Mastersteuerung.
MotionChip™ Technologie: Hauptkern aller Technsoft Servoregler ist der MotionChip™ – ein intelligenter frei programmierbar Controller speziell für komplexe Motion-Control-Aufgaben konzipiert. Der MotionChip™ bietet die Möglichkeit, den leistungsstarken digitaler Signalprozessor (DSP) von Texas Instruments als unabhängige, intelligente Einheit einzusetzen. Dadurch werden viele Aufgaben einer komplexen Mastersteuerung direkt vom dem MotionChip™ gelöst, sodass die globale Funktion einer Maschine entlastet und damit das Management einer Master-Applikation gut optimiert werden kann. Alle wichtigen Steuerungs-Funktionen eines Reglers wie etwa eine Vielzahl von Betriebsmodi, SPS-Eigenschaften, Schutz- und Sicherheitsfunktionen sowie auch Support für die unterschiedliche Schnittstellen- und Motortechnologien sind auf dem MotionChip™ untergebracht, und ermöglichen somit einen flexiblen Einsatz in den verschiedensten Antriebssystemen.
- Supply Voltage:
- 12 - 48 VDC
- Output Current - Nominal:
- 0.3 Nm
- Peak Current:
- Communication:
- RS-232,EtherCAT
- Controlled Motors:
- Schrittmotoren
- Sensors:
- Absolutencoder
- Motion Control:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Digital Inputs:
- 4
- Digital Outputs:
- 2
- Analog Inputs:
- 1
-


iMOT172S TM-CAT
Datenblätter

iMOT172S TM-CAT
Kabel-Set -

iMOT172S TM-CAT
Benutzerhandbuch - EasyMotion Studio II
Leaflet
EtherCAT (CoE) Handbuch (ESM I)
EtherCAT (CoE) Handbuch (ESM II)
EtherCAT ESI XML-Datei
3D model (*.step) -


iMOT172S TM-CAT
Anschlusspläne - P036.121.E322 – iMOT172S TM-CAT, intelligent step motor, EtherCAT
P038.040.C299 – CCS iMOT17 TM-CAT150 (complete 150-cm cable set for iMOT17 TM-CAT)
P038.040.C013 – CA M890-M890 ECAT 150 (Cable M8 90deg 150 cm to M8 90deg EtherCAT)
P034.002.E001 – EasyMotion Studio II (software)
iMOT172S TM-CAT 12-48V 300 mNm Schrittmotor EtherCAT
Schrittmotor mit integrierter, frei programmierbarer Regelungselektronik, Absolutencoder und EtherCAT-Schnittstelle. Durch die integrierte Steuerung wird der Verkabelungsaufwand auf die Kommunikationsverbindung und die Stromversorgung reduziert und die elektromagnetische Verträglichkeit deutlich verbessert. Das äußerst kompakte Antrieb ist bereits optimal ausgelegt, sofort betriebsbereit und ermöglicht somit eine einfache Integration auf engstem Raum.
Leistungsdaten:
Betriebsspannung: 12 – 48 VDC / Nennstrom: 3 A
Nenndrehmoment: 300 mNm @ 1200 UpM
Leerlaufdrehzahl: 1700 UpM @ 48 VDC
Kommunikation:
RS232 – bis zu 115 k
EtherCAT – mit CANopen over EtherCAT (CoE) Protokoll
Digitale und analoge Ein-/Ausgänge:
4 digitale Eingänge: 5-24 V, NPN oder PNP konfigurierbar
2 digitale Ausgänge: 24 V, 0.5 A, NPN Open-Collector
1 analoger Eingang: 12 Bit, 0-5 V
Feedback: Integrierter magnetischer Singleturn-Absolut-Encoder mit einer Auflösung von 4096 Inkremente pro Umdrehung (12 bit).
Sicherheit: Programmierbare Schutzeinrichtungen gegen Überstrom, Übertemperatur, Unter- und Überspannung, I2t und Schleppfehler.
Ansteuerung:
über Feldbus oder Analog-/Digitaleingänge.
Standalone durch autonome Ausführung komplexer Bewegungsabläufe direkt aus dem nichtflüchtigen Speicher des integrierten Controllers.
Steuermodis:
Closed-Loop mit Sinuskommutierung und feldorientierter Regelung (FOC) für hohe Dynamik, Laufruhe und Effizienz.
Open-Loop mit bis zu 512 Mikroschritte pro Vollschritt, Schrittverlusterkennung und automatischer Positionsausgleich.
Betriebsmodis:
Positions- ,Drehzahl- und Drehmomentregelung
Pfadgenerator mit Trapez- und Sinusrampen
Profile Position Mode, Velocity Mode, Homing Mode
Interpolated Position mit lineare (PT) und kubische Splines (PVT)
Cyclic Synchronous Position (CSP), Velocity (CSV), Torque (CST)
Elektronische Getriebe (EGEAR) und Kurvenscheiben (ECAM)
Motion-Contouring über Position, Geschwindigkeit, Drehmoment oder Spannung
Analoge Kommandierung, Takt/Richtung
EasyMotion Studio-Software:
Grafische Programmieroberfläche mit vielen Funktionen und Wizards für die einfache Inbetriebnahme, Konfiguration und lokale Programmierung komplexer Ablaufprogrammen auf Einachs- oder Mehrachssysteme.
Ermöglicht die Auswahl von Motortechnologie, Encoder-Schnittstelle und Steuerungsstruktur sowie die Einstellung von Schutz- und Reglerparameter.
Erweiterte Analyse- und Optimierungs-Tools über die vorhandenen Control-Panels, Logger und Scopefunktionalität.
Automatische Ermittlung der PID-Reglerparameter (Autotuning).
Technosoft Motion Language (TML): Über die sehr flexible TML-Programmiersprache lassen sich verschiedene Betriebsarten, Bewegungsprofile, Referenzfahrten oder die Steuerung von komplexen Ablaufprogrammen graphisch programmieren und autonom aus dem nichtflüchtigen Speicher des Controllers ausführen. Die Antriebsregler können analoge und digitale E/A Signale verarbeiten, arithmetische und logische Operationen berechnen, Sprung- und Funktionsaufrufe, Ereignisse und Interrupt Routinen (ISR) ausführen sowie auch Daten und Befehle zwischen den Achsen austauschen. Einachs- und Mehrachs-Stand-Alone-Anwendungen lassen sich mit selbsterstellten Ablaufprogrammen einfach realisieren, auch ohne den Einsatz einer komplexen CANopen- oder EtherCAT-Mastersteuerung.
MotionChip™ Technologie: Hauptkern aller Technsoft Servoregler ist der MotionChip™ – ein intelligenter frei programmierbar Controller speziell für komplexe Motion-Control-Aufgaben konzipiert. Der MotionChip™ bietet die Möglichkeit, den leistungsstarken digitaler Signalprozessor (DSP) von Texas Instruments als unabhängige, intelligente Einheit einzusetzen. Dadurch werden viele Aufgaben einer komplexen Mastersteuerung direkt vom dem MotionChip™ gelöst, sodass die globale Funktion einer Maschine entlastet und damit das Management einer Master-Applikation gut optimiert werden kann. Alle wichtigen Steuerungs-Funktionen eines Reglers wie etwa eine Vielzahl von Betriebsmodi, SPS-Eigenschaften, Schutz- und Sicherheitsfunktionen sowie auch Support für die unterschiedliche Schnittstellen- und Motortechnologien sind auf dem MotionChip™ untergebracht, und ermöglichen somit einen flexiblen Einsatz in den verschiedensten Antriebssystemen.
• Intelligenter Kompaktantrieb in 42 mm Baugröße (NEMA 17)
• Schrittmotor mit integriertem frei programmierbarem Servoregler
• Hohe Dynamik und Effizienz durch feldorientierte Regelung (FOC)
• Betriebsspannung: 12 – 48 V / Nenndrehmoment: 300 mNm
• Magnetischer Singleturn-Absolut-Encoder mit 4096 I/Udr. (12 bit)
• Schnittstelle: EtherCAT, RS232
• Steckverbindersystem: M8/M12- Analog Inputs:
- 1
- Supply Voltage:
- 12 - 48 VDC
- Communication:
- RS-232,EtherCAT
- Controlled Motors:
- Schrittmotoren
- Digital Inputs:
- 4
- 2
- Digital Outputs:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Motion Control:
- 0.3 Nm
- Output Current - Nominal:
- Absolutencoder
- Sensors:
- Peak Current:
-
iMOT172S TM-CAT
Datenblätter
iMOT172S TM-CAT
Kabel-Set -
iMOT172S TM-CAT
Benutzerhandbuch - EasyMotion Studio II
Leaflet
EtherCAT (CoE) Handbuch (ESM I)
EtherCAT (CoE) Handbuch (ESM II)
EtherCAT ESI XML-Datei
3D model (*.step) -
iMOT172S TM-CAT
Anschlusspläne - P036.121.E322 – iMOT172S TM-CAT, intelligent step motor, EtherCAT
P038.040.C299 – CCS iMOT17 TM-CAT150 (complete 150-cm cable set for iMOT17 TM-CAT)
P038.040.C013 – CA M890-M890 ECAT 150 (Cable M8 90deg 150 cm to M8 90deg EtherCAT)
P034.002.E001 – EasyMotion Studio II (software)
Intelligente Motoren
Hauptkern aller Technsoft Kompaktantriebe ist der MotionChip™ – ein intelligenter frei programmierbar Motion-Controller der speziell für komplexe Motion-Control-Aufgaben konzipiert wurde. Der MotionChip™ bietet die Möglichkeit, den leistungsstarken digitaler Signalprozessor (DSP) von Texas Instruments als unabhängige, intelligente Einheit einzusetzen. Dadurch werden viele Aufgaben einer komplexen Mastersteuerung direkt vom dem MotionChip™ gelöst, sodass die globale Funktion einer Maschine entlastet und damit das Management einer Master-Applikation gut optimiert werden kann.
Der MotionChip™ ist als eigenständiger Controller oder im Rahmen eines Mehrachsensystems auf Echtzeit-Netzwerkbasis einsetzbar. Er kann für verschiedene Kommunikations-Arten eingerichtet werden und basiert hauptsächlich auf Netzwerkstandards wie RS232, CAN/CANopen und EtherCAT.
Alle wichtigen Steuerungs-Funktionen eines Reglers wie etwa eine Vielzahl von Betriebsmodi, unterschiedliche Schnittstellen zur Kommandierung sowie auch SPS-Eigenschaften sind auf dem MotionChip™ untergebracht, und ermöglichen einen flexiblen Einsatz in den verschiedensten Antriebssystemen.
Komplexen Programmabläufe, Homing Prozeduren, Regelalgorithmen und Berechnungen für ganze Ein- oder Mehrachssysteme können graphisch programmiert und autark auf dem MotionChip™ abgearbeitet werden, womit eine übergeordnete Mastersteuerung entfällt.