Spezielle Programmiersprache hilft, komplexe Steuerungskonzepte umzusetzen
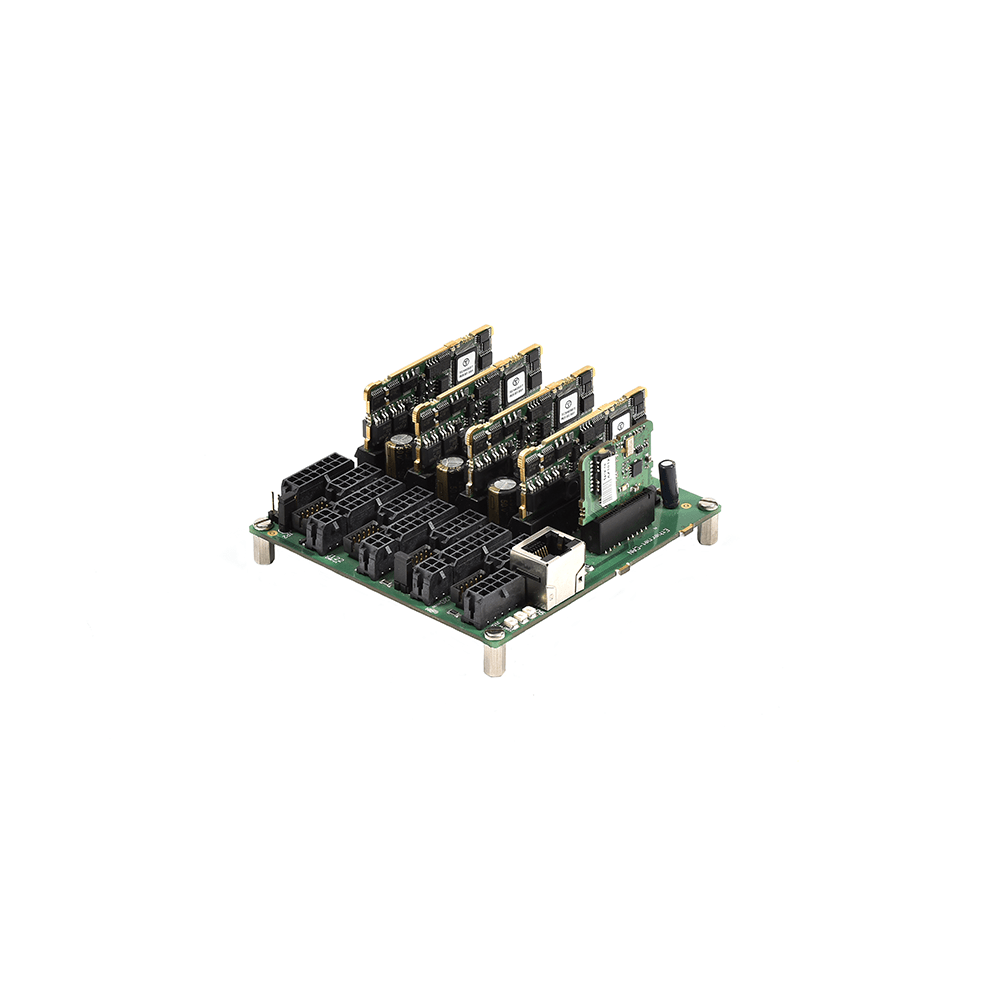
Zahlreiche Anwendungen in verschiedenen Branchen benötigen kompakte Servoregler, um präzise definierte Achs-Bewegungen in Reihenfolge oder parallel durchzuführen. In der Regel wird dieses Zusammenspiel über eine Master-Einheit koordiniert, die den einzelnen Slave-Achsen entsprechende Befehle gibt. Allerdings ist es notwendig, die gesamte Steuerungsarchitektur sowie den Datentransfer mit dem Master abzugleichen beziehungsweise auf ihn auszurichten. Die einzelnen Slave-Achsen können untereinander nicht kommunizieren oder selbstständig Bewegungssequenzen ausführen. Die Technosoft SA bietet hingegen verschiedenste intelligente Antriebsregler mit integriertem Motion Controller, die Bewegungen ganz ohne Master dank lokaler Programmierung ausführen können. Möglich wird dies durch die spezielle Programmiersprache TML (Technosoft Motion Language), mit der sich die einzelnen Regler so konfigurieren lassen, dass sie sich untereinander synchronisieren und kommunizieren – ganz ohne eine übergeordnete Steuerung. Da kein datenintensiver Austausch zwischen ihnen notwendig ist, können verschiedene Anwendungen unterstützt werden, ohne einen kostenintensiven BUS-Standard oder eine zentrale Master-Steuerung einsetzen zu müssen. So lässt sich auf die Frage, was ein medizinisches Diagnosesystem oder eine automatische Dönerschneidemaschine gemeinsam haben, als Teil der Antwort das intelligente Motion-Control-Konzept von Technosoft geben.
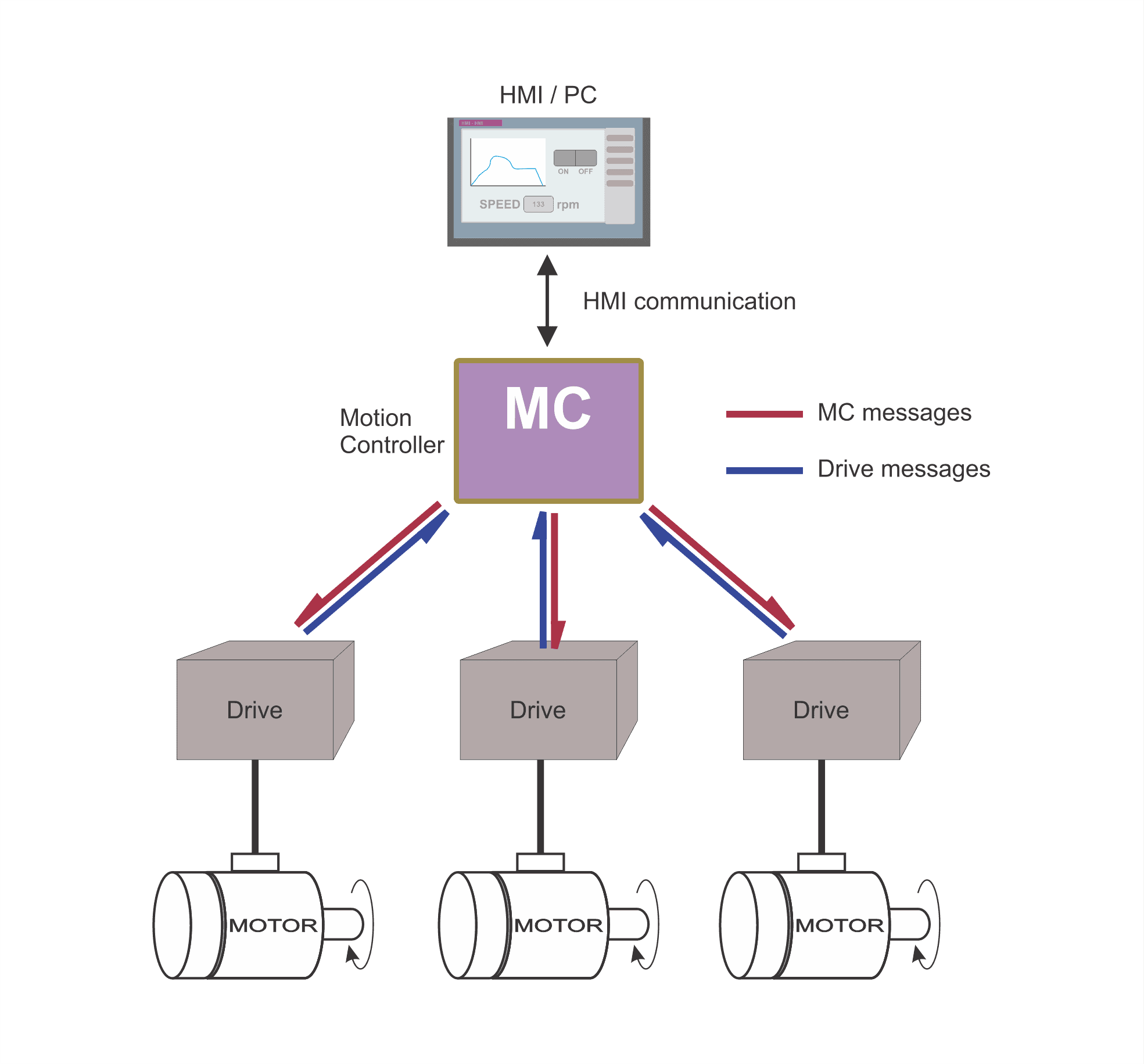
Für viele verschiedene Anwendungen wie beispielsweise roboterunterstützte Operationen im Krankenhaus, die Steuerung von Analysegeräten in der Forschung, das Abtasten bei 3D-Lasermesssystemen und beim Laserschneiden in der Fertigung oder die Bewegung von Greifvorrichtungen im Handling gilt: In all diesen Anwendungen sorgen kleine, verborgene Motoren für die präzise Bewegungsumsetzung der verschiedenen Komponenten wie Linear- oder Rotationsachsen. Heutzutage wird die Steuerung der einzelnen Motoren, die ganz unterschiedlicher Art sein können, über eine Master-Slave-Architektur realisiert und über den Master umgesetzt, der mit den entsprechenden Befehlen und Bewegungsprofilen programmiert sein muss. Dieser muss den Zeitpunkt und die Durchführung jeder Bewegung kontrollieren. „Allerdings sind dabei alle Antriebe von dieser zentralen ‚Intelligenz‘ abhängig und können nicht selbstständig untereinander kommunizieren und sich synchronisieren, um beispielsweise gleichzeitig Bewegungsabläufe auf allen Achsen zu starten“, erklärt Dr. Radu Giuclea, Manager Sales & Engineering der Technosoft SA. „Dies führt unweigerlich zu hohem Programmieraufwand, da die gesamte Anwendungsarchitektur auf die Mastersteuerung und deren Kommunikationsumgebung hin geplant und konfiguriert werden muss.“ Insbesondere bei Mehrachsanwendungen kann dies zu einer Herausforderung werden. Zudem muss die geeignete Lösung den Motorentyp und das Kommunikationsprotokoll identifiziert und berücksichtigt werden.
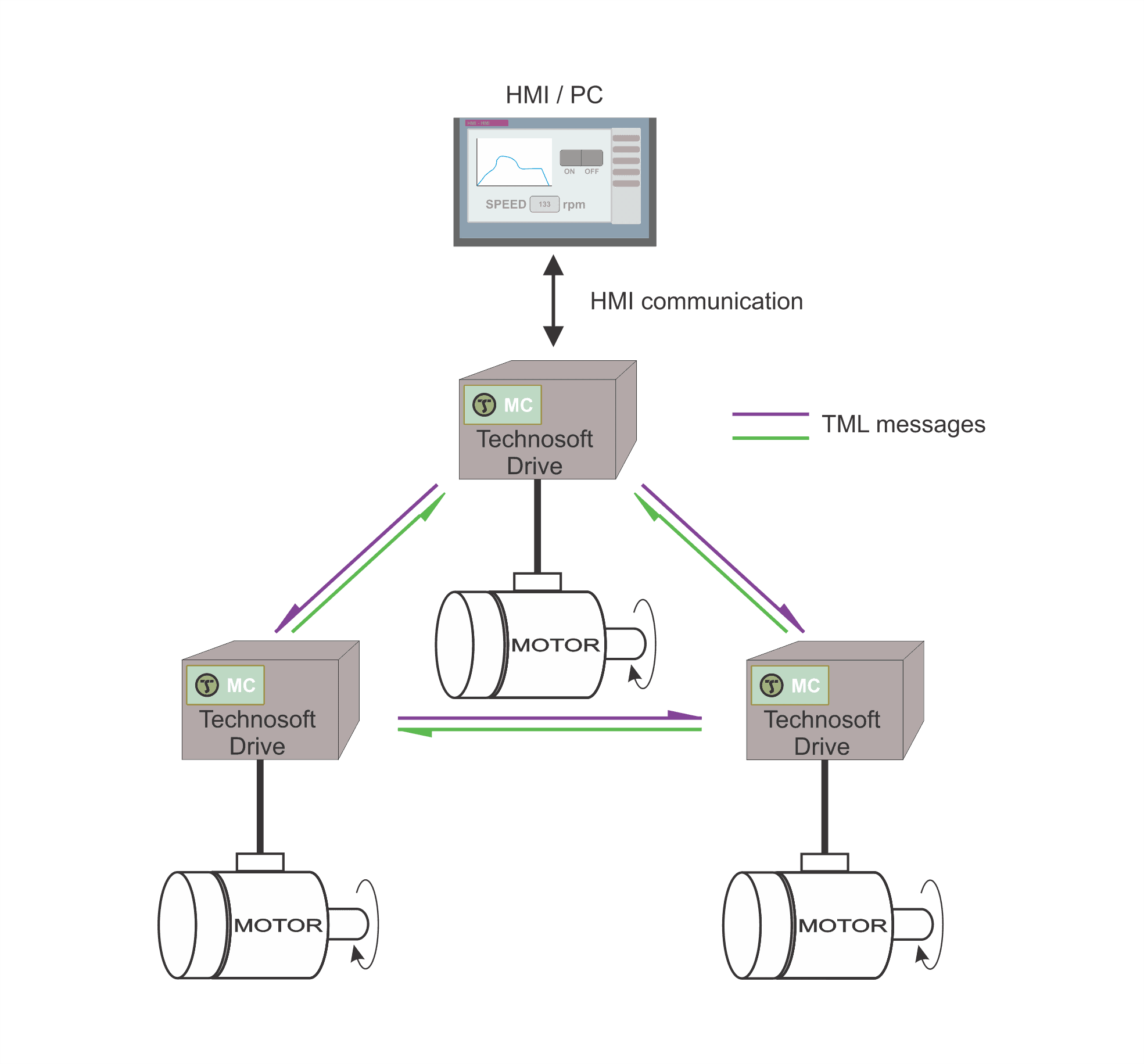
Daher hat sich die Technosoft SA darauf spezialisiert, intelligente Antriebsregler zu entwickeln, die bereits einen leistungsstarken Motor und Motion Controller in einer kompakten Einheit vereinen, sodass sie auch ohne externe Mastereinheit komplexe Bewegungen umsetzen können. Dazu nutzt das Unternehmen die selbst entwickelte Programmiersprache TML, mit der sich komplexe Befehle vereinfacht auf den Speicher der einzelnen Regler programmieren lassen. Dadurch können sie ohne Masterbefehle und unabhängig voneinander Bewegungsprofile ausführen, aber sich auch untereinander synchronisieren. Dank dieser hohen Flexibilität lässt sich sogar eine laufende Bewegung anpassen. Beispielsweise kann über ein HMI das Bewegungsprofil geändert und eine Zwischenposition gesetzt werden.
TML-Funktionen bieten hohe Programmierflexibilität auf Antriebsebene
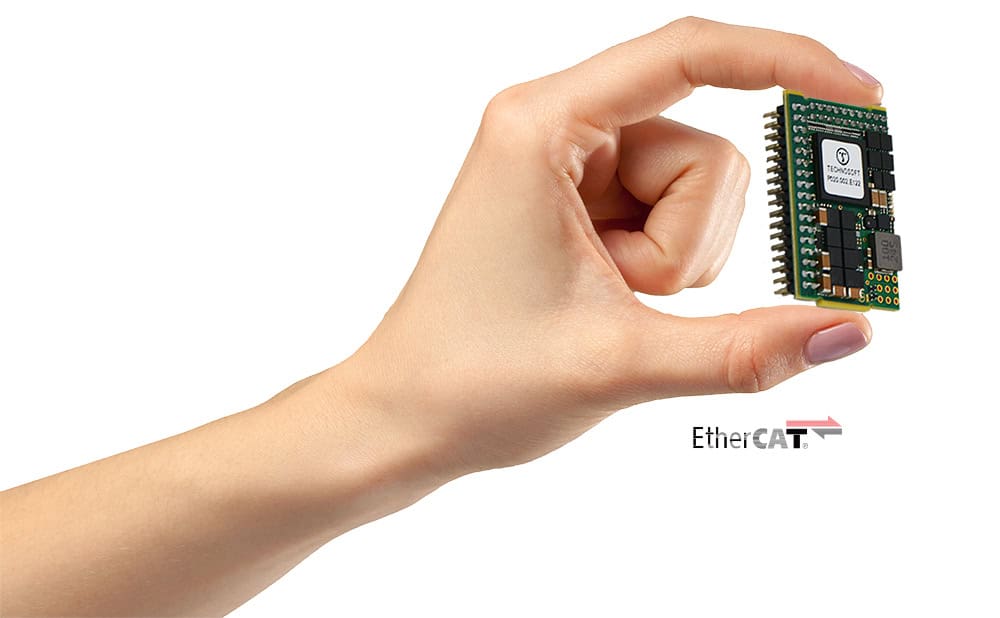
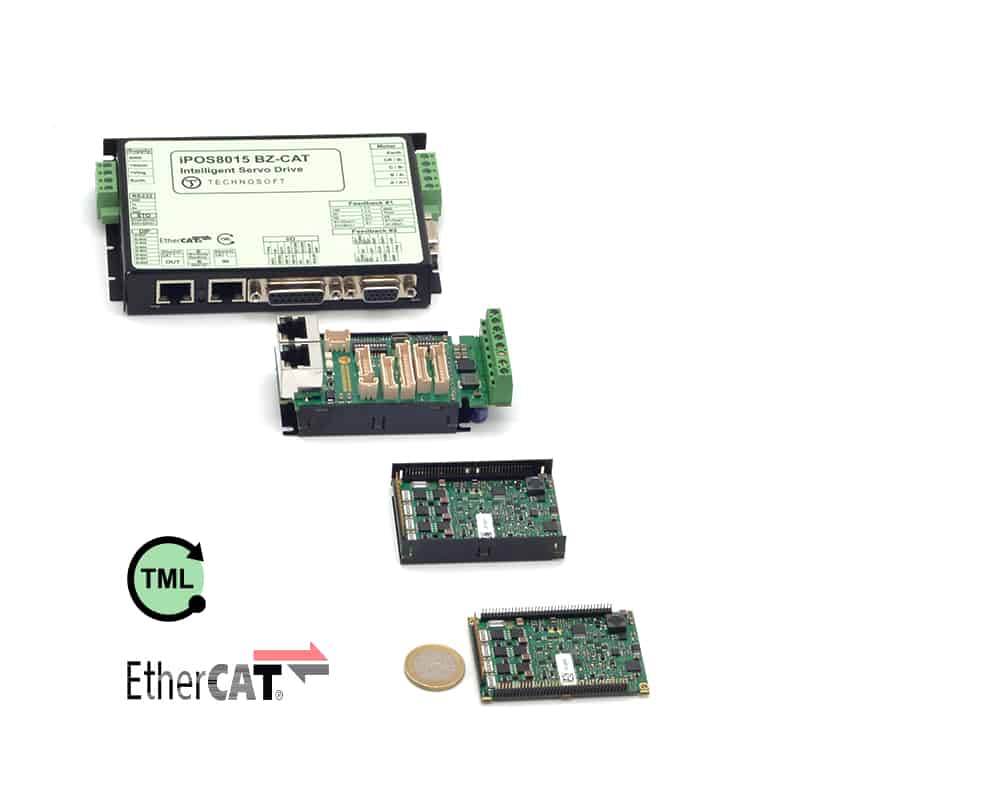
Die Technosoft-Antriebsregler besitzen bereits alle erforderlichen Funktionalitäten in einer platzsparenden Einheit – hautpsächlich Motion Controller, Leistungselektronik, E/A-Signale und RS232, CAN/CANopen oder EtherCAT Schnittstelle. Dadurch wird eine hohe Programmierflexibilität schon auf Antriebsebene bereitgestellt, die sich mithilfe von TML umsetzen lässt. Dabei haben die Entwickler darauf Wert gelegt, dass die Programmierung so einfach und intuitiv wie möglich erfolgen kann: In einem ersten Schritt werden den TML-Registern beziehungsweise Funktionen und Parametern die richtigen Werte zugewiesen. Diese Zahlenwerte repräsentieren wiederum einzelne Anwendungsparameter. So kann das Profil der jeweiligen Anwendung beschrieben, die Art des Motors bestimmt, Betriebseinstellungen wie Abtastraten oder Kommutierungsmodus gewählt und Regelungsparameter wie Beschleunigung, Drehzahl und Position eingestellt werden. Dieses Funktionspaket beziehungsweise Programm wird dann den einzelnen Servoreglern zugeordnet und auf deren nichtflüchtigen Speichern hinterlegt. „Dabei wird auch der Zeitpunkt, zu dem die Bewegung beginnen soll, festgelegt. Der Servoregler wird so zu seinem eigenen Master“, erklärt Dr. Giuclea das Grundprinzip.
Anstatt darauf zu warten, dass eine zentrale Mastersteuerung Befehle erteilt, kann nun jeder Antrieb selbstständig aktiv werden. So lassen sich auch mehrere Achsen gleichzeitig bewegen (multicast), ohne einen großen Datenfluss über die übergeordnete Steuerung zu generieren. Dabei kann ein einzelner Antriebsregler auch selbst als Master oder Kommunikationszentrale definiert werden, um zum Beispiel alle Achsen in einem Netzwerk zu synchronisieren. Gleichzeitig behält der Anwender über die PC-Software oder ein anderes HMI-Gerät Zugriff und kann online unter anderem das Bewegungsprofil ändern – etwa eine Zwischenposition setzen oder die Geschwindigkeit anpassen. Dank der TML-Funktionen lässt sich auch das gesamte Homing programmieren und der Antrieb so einstellen, dass er selbstständig wieder auf eine Startposition geht, sobald dies erforderlich ist. „TML ermöglicht zudem, komplette TML Bibliotheken für verschiedene Masterumgebungen oder bestimmte SPS zu schreiben, sodass die Motoren und deren Kommunikation ohne großen Aufwand untereinander optimal auf die entsprechende Anwendungs- und Hardware-Umgebung hin angepasst sind“, erläutert Dr. Giuclea.
Binäre Kodierung ersetzt speicherintensiven Datentransfer
TML fungiert in Bezug auf die Kommunikation zwischen den Servoreglern außerdem als Übersetzer: Anstatt große Datenmengen zwischen dem Master/Host und den Reglern senden zu müssen, erfolgt der Befehlsaustausch über binäre Sequenzen, die repräsentativ für die TML-Kodierung der jeweiligen Funktion stehen. „Da sich die Programmierung bereits auf dem Speicher des Antriebsreglers befindet, müssen diese lediglich einen Befehl erhalten, welche Funktion beziehungsweise welcher Programmablauf abgerufen werden soll. Es braucht also nicht der gesamte Bewegungsablauf inklusive Parameter über den Master gesendet werden“, so Dr. Giuclea. Durch diese vereinfachte Kommunikation untereinander lassen sich auch viele Anwendungen unterstützen, die sonst eine schnelle oder kostenintensive BUS-Schnittstelle oder zentrale Steuerung benötigen. „Aufgrund dieser vereinfachten Kommunikation und der TML Bibliotheken sind der Programmierung keine Grenzen gesetzt, weshalb auch die Kompatibilität mit vielen Antriebstypen wie bürstenlosen EC-Motoren, bürstenbehafteten DC-Motoren, Linearmotoren, Voice Coils und Schrittmotoren gegeben ist“, resümiert Dr. Giuclea. „Anwender, die bisher verschiedene Servoregler verwendet haben, um verschiedene Motortechnologien anzusteuern oder Geld für teure Motion-Controller ausgeben mussten, sind von den Möglichkeiten der intelligenten Technosoft-Servoregler überwältigt. Dadurch ergeben sich eine enorme Flexibilität und neue Optionen, die Steuerungsarchitektur zu gestalten bei gleichzeitig geringerer Markteinführungszeit und Gesamtsystemkosten.“






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}