Introduction
Precise coordination of multiple axes is essential in motor control applications that involve complex motion profiles. From robotics to CNC machinery, synchronized multi-axis control ensures a stable operation and prevents motor drift. Technosoft drives are engineered to offer a robust multi-axis synchronization capability through standard communication protocols such as CANopen/TMLCAN and EtherCAT, configurable through our own EasyMotion Studio application.
General Principles
When working in a multi-axis application, it’s critical that all the motors move in sync, not just roughly at the same time, but in precise alignment down to the control loop of the drives. Synchronization in multi-axis systems means coordinating all motors, so they start at the same moment, follow their motion profiles in parallel, and maintain their positions throughout the process.
It’s important to note that in order for multiple axes to be synchronized, they must communicate with each other in real time. This is typically achieved through fieldbus systems such as CANopen or EtherCAT, which enables the exchange of motion data and synchronization signals between drives.
Master-Slave Architecture
The synchronization is achieved through a master-slave architecture.
To ensure synchronized operation, the master device periodically sends a synchronization message to all axes, including itself. Upon receiving this message, each axis records its internal time. The master then broadcasts its internal time to all slave axes, which compare it with their own. If there are differences, the slaves slightly correct their sampling periods in order to keep them synchronized with those of the master.
As a result, when synchronization is active, the control loops on all axes operate in sync with the master, with a timing accuracy of just few microseconds. This mechanism effectively eliminates the possible clock drift between the master and slave axes.
The TML command used to send the synchronization message is SETSYNC value. The value represents the time interval in internal units between the synchronization messages sent by the master. Synchronization is active when the value is different from 0.
The synchronization process described above can be implemented in our EasyMotion Studio software and uses the CAN bus to send the sync message to all the drives on the bus.
In the EasyMotion Studio application you can navigate to the “motion” section and select the “Data transfer between axes” here you will see an option send Synchronization message period; once the code is being executed the synchronization process will begin for all the axes that are connected on the bus.
![]()
After setting up the synchronization, the user can now develop a movement profile using our TML language to execute a complex movement with multiple axes.
Communication protocol
In the planning stage of a motion control application with multiple motors that needs to be synchronized, the selection of a communication protocol is critical to a system’s accuracy and latency. EtherCAT and CANopen are two of the most commonly used fieldbus protocols in industrial automation. They are both supported by Technosoft’s drives along with our own protocol TMLCAN. Although all protocols permit master-slave configurations with executed coordinated motion, their different approaches to timing, messaging, and data management set them apart.
Ethercat synchronization
Ethercat is a high performance, real-time ethernet protocol designed specifically for industrial automations. In synchronized multi-axis system, the master will be configured to send a SYNC0 signal to all the drives connected to the master. When the slaves/drives receive this signal, they will adjust their internal clock and start the control loop after a small delay(∆T1). The ∆T1 delay can be adjusted via a EtherCAT object.
This robust mechanism allows all the slaves connected to the EtherCAT master to be synchronized and perform synchronized movements.
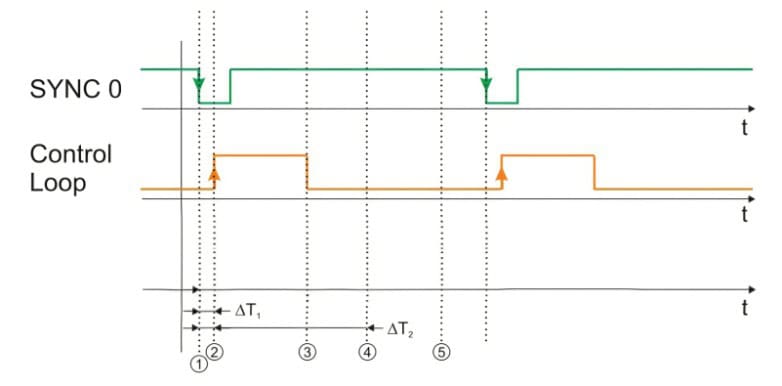
It is important to note that when configuring the EtherCAT master, the SYNC0 signal must have a period equal or multiple than the drives slow control loop.
Our drives support cyclic data exchanges that enable synchronization through time-triggered communication cycles, such as Cyclic Synchronous Position (CSP), Velocity (CSV), and Torque (CST) modes. These modes operate on a shared time base and are designed for high-precision, real-time control. In CSP mode, the drive receives target positions at each cycle for accurate trajectory tracking. CSV mode allows smooth speed transitions by continuously updating velocity targets, while CST mode regulates torque output, making it ideal for force-controlled applications. Together, these modes ensure precise and coordinated operation, especially in multi-axis systems. The cyclic synchronous modes of operation are available for both CANopen and EtherCAT.
CANopen/TMLCAN Synchronization
CANopen is another widely used protocol in industrial motion systems. Synchronization in CANopen is done using a special message – the SYNC message – which is sent by the master as a broadcast to all the slaves from the network to signal the start of a new process data exchange cycle.
The SYNC (COB ID 0x80 and no Data) message is sent periodically; the SYNC object tells all nodes when to sample or transmit their Process Data Objects (PDOs). Technosoft intelligent drives can act both as a SYNC consumer(slave) and producer(master) of the SYNC message.
CANopen drives can be configured to transmit the data after receiving SYNC message (synchronous) also called time driven or event driven also called independent (asynchronous).
Compared to EtherCAT, CANopen offers less precise synchronization, mainly due to differences in protocol structure. EtherCAT uses Distributed Clocks and hardware-based signals like SYNC0 to trigger time-critical tasks with very high accuracy. On the other hand, CANopen relies on a broadcast SYNC message, sent without any data, to align the timing of devices on the network. This approach works well for many applications that don’t require the precision level that EtherCAT can provide.
Both protocols have their advantages, but CANopen has a greater adoption overall due to its simplicity and lower cost. It is frequently used in utility vehicles, basic automation, or embedded control systems. These industries often have limited hardware needs and easy integration, as well as need for real-time performance, making CANopen a good fit.
In contrast, EtherCAT is first choice in high-performance industrial automation in areas such as robotics, where fast data exchange is required alongside precise synchronization, like in multi-axis motion control or where a huge flux of real-time data is needed for machine operation like in the medical application
Conclusion
For coordinated multi-axis applications, precise motor synchronization is crucial to both performance and accuracy. From robotics and CNC machines, multi-axis synchronization ensures that all motor movements are perfectly aligned, eliminating drift and mechanical stress.
Technosoft drives are designed to support motion synchronization based on master-slave architecture over CANopen/TMLCAN with periodic SYNC messages or EtherCAT utilizing its Distributed Clock mechanism, ensuring reliable and precise motion control across many complex applications.
Contact our team today!



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}