- « Back to Catalog
iPOS360x SX-CAN 4-Axis Motion System CANopen/Ethernet
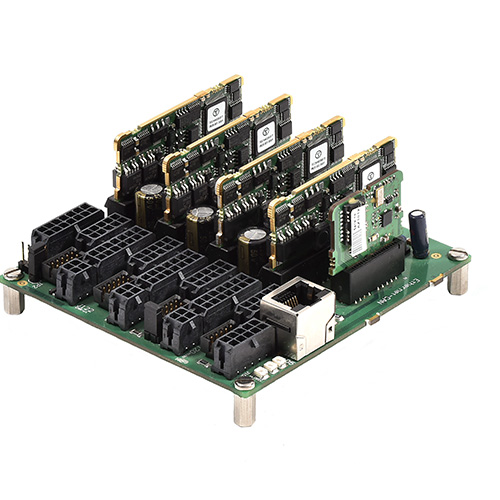
• Motion-System mit bis zu 4 iPOS360x VX-CAN Antriebsregler
• Zur Ansteuerung von DC-, BLDC-, Linear- oder Schrittmotoren
• Leistungsspannung: 9-36 VDC; Logikspannung: 7-36 VDC
• Ausgangsstrom/Achse: 4 A Dauer-, 10 A Spitzenstrom
• RS232, TMLCAN, CANopen (CiA301, 305 & 402) und Ethernet
• Inkrementalgeber, SinCos (1Vss), Digitale- und Analoge-Hallsensoren
• Abmessungen (L x B x H): 98 x 100.3 x 21.2 mm
Hochmodulare und kompakte Trägerplatine, die mit bis zu 4 Antriebsreglern vom Typ iPOS360x VX-CAN ausgestattet werden kann.
Versorgungsspannung: 9-36 VDC
Ausgangsstrom pro Achse:
iPOS3604 VX-CAN: 4 A Dauer-, 10 A Spitzenstrom
iPOS3602 VX-CAN: 2 A Dauer-, 3.2 A Spitzenstrom
Motortypen:
Bürstenlose Gleichstrommotoren (BLDC-, PMSM-Motoren)
Bürstenbehaftete Gleichstrommotoren (DC-Motoren)
Direktantriebe (Linear- und Torquemotoren)
Voice Coil Aktuatoren (Tauchspulen)
Schrittmotoren (2- oder 3-phasige)
Feedbackmöglichkeiten:
Inkrementalgeber
SinCos 1Vss
Digitale Hallsensoren
Analoge Hallsensoren
Ansteuerung:
Über Feldbus, Takt/Richtung oder Analog-/Digitaleingänge.
Standalone durch autonome Ausführung komplexer Bewegungsabläufe direkt aus dem nichtflüchtigen Speicher des Controllers.
Kommunikation:
RS232 – bis zu 115 k
CANopen – gemäß den CiA-Profilen 301, 305 und 402
TMLCAN – Technosofts proprietäres CAN Protokoll
EtherNet – optional über ein Zusatzmodul
Digitale und analoge Ein-/Ausgänge:
4 x 5 digitale Eingänge: 5-36 V, NPN
4 x 4 digitale Ausgänge: 5-36 V, 0.5 A, NPN
4 x 2 analoge Eingänge: 12 Bit, 0-5 V
Sicherheit: Schutzeinrichtungen gegen Überstrom, Übertemperatur, Unter- und Überspannung, I2t und Schleppfehler.
Regeleigenschaften:
Sinuskommutierung mit feldorientierte Regelung (FOC) über Encoder, Hallsensoren oder Sensorlos.
Schnelle und hochpräzise kaskadierte Regelkreise mit frei einstellbaren Abtastraten und PWM-Schaltfrequenz bis 100 kHz
Hervorragende Resonanz- und Schwingungsunterdrückung durch den gleichzeitigen Einsatz von bis zu 2 Notch-, Tiefpass-, Hochpass- oder Bandpassfiltern.
Steuerung von Schrittmotoren im closed-loop (FOC) oder im open-loop mit 1/512-µSchritt, Schrittverlusterkennung und automatischer Positionsausgleich.
Betriebsmodis:
Positions- ,Drehzahl- und Drehmomentregelung
Pfadgenerator mit Trapez- und Sinusrampen
Profile Position Mode, Velocity Mode, Homing Mode
Interpolated Position mit lineare (PT) und kubische Splines (PVT)
Cyclic Synchronous Position (CSP)
Elektronische Getriebe (EGEAR) und Kurvenscheiben (ECAM)
Motion-Contouring über Position, Geschwindigkeit, Drehmoment oder Spannung
Analoge Kommandierung, Takt/Richtung
EasyMotion Studio-Software:
Grafische Programmieroberfläche mit vielen Funktionen und Wizards für die einfache Inbetriebnahme, Konfiguration und lokale Programmierung komplexer Ablaufprogrammen auf Einachs- oder Mehrachssysteme.
Ermöglicht die Auswahl von Motortechnologie, Encoder-Schnittstelle und Steuerungsstruktur sowie die Einstellung von Schutz- und Reglerparameter.
Erweiterte Analyse- und Optimierungs-Tools über die vorhandenen Control-Panels, Logger und Scopefunktionalität.
Automatische Ermittlung der PID-Reglerparameter (Autotuning).
TML Bibliotheken: Zur Anbindung an PCs, SPS und µController verfügt Technosoft über verschiedene Bibliotheken – beispielsweise für Linux, Delphi, Visual Basic, C++, C# oder LabView. Mit ihrer Hilfe können die Technosoft-Antriebsregler in vorhandene Systeme ohne Probleme eingebunden werden. Das Protokoll ist TML und die Kommunikation kann über RS232, CAN-Bus, Ethernet oder USB erfolgen.
Technosoft Motion Language (TML): Über die sehr flexible TML-Programmiersprache lassen sich verschiedene Betriebsarten, Bewegungsprofile, Referenzfahrten oder die Steuerung von komplexen Ablaufprogrammen graphisch programmieren und autonom aus dem nichtflüchtigen Speicher des Controllers ausführen. Die Antriebsregler können analoge und digitale E/A Signale verarbeiten, arithmetische und logische Operationen berechnen, Sprung- und Funktionsaufrufe, Ereignisse und Interrupt Routinen (ISR) ausführen sowie auch Daten und Befehle zwischen den Achsen austauschen. Einachs- und Mehrachs-Stand-Alone-Anwendungen lassen sich mit selbsterstellten Ablaufprogrammen einfach realisieren, auch ohne den Einsatz einer komplexen CANopen- oder EtherCAT-Mastersteuerung.
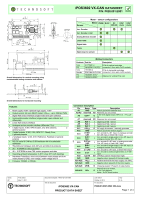
MotionChip™ Technologie: Hauptkern aller Technsoft Servoregler ist der MotionChip™ – ein intelligenter frei programmierbar Controller speziell für komplexe Motion-Control-Aufgaben konzipiert. Der MotionChip™ bietet die Möglichkeit, den leistungsstarken digitaler Signalprozessor (DSP) von Texas Instruments als unabhängige, intelligente Einheit einzusetzen. Dadurch werden viele Aufgaben einer komplexen Mastersteuerung direkt vom dem MotionChip™ gelöst, sodass die globale Funktion einer Maschine entlastet und damit das Management einer Master-Applikation gut optimiert werden kann. Alle wichtigen Steuerungs-Funktionen eines Reglers wie etwa eine Vielzahl von Betriebsmodi, SPS-Eigenschaften, Schutz- und Sicherheitsfunktionen sowie auch Support für die unterschiedliche Schnittstellen- und Motortechnologien sind auf dem MotionChip™ untergebracht, und ermöglichen somit einen flexiblen Einsatz in den verschiedensten Antriebssystemen.- Supply Voltage:
- 12 V,24 V,36 V
- Output Current - Nominal:
- 4x4 A
- Peak Current:
- Communication:
- RS-232,CANopen / TMLCAN,Ethernet
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Sensors:
- Incremental,1Vpp Sin/Cos,Digital Halls,Analog Halls,Tacho,Sensorless
- Motion Control:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Digital Inputs:
- 4x5
- Digital Outputs:
- 4x4
- Analog Inputs:
- 4x2
-


iPOS360x SX
Datenblätter
iPOS3604 VX-CAN
Datenblätter
iPOS3604 VX-CAN
Datenblätter
iPOS360x SX-CAN
Kabel-Set -

iPOS360x SX
Benutzerhandbuch - EasyMotion Studio II
TML Motion Bibliotheken
CANopen Handbuch (ESM I)
CANopen Handbuch (ESM II)
CANopen EDS-Datei
3D model (*.step) -


iPOS360x SX
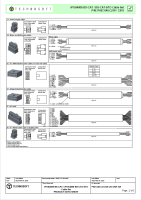
Anschlusspläne - P028.002.E884 – iPOS360x MBX-CAN motherboard (4 axes, iPOS360x VX, CAN)
P028.002.E894 – iPOS360x MBX-NET motherboard (4 axes, iPOS360x VX, Ethernet compatible)
P038.022.E001 – ENET-VX interface (Ethernet plug-in)
P028.040.C179 – HC 4 x iPOS360x SX (housing & crimp pin set for the MBX 4-axis motherboard)
P028.040.C198 – CCS 4 x iPOS360x SXE (Complete cable set, 100 cm, for the MBX 4-axis system: power, RS232, CAN, motor, single-ended encoder feedback, I/O)
P028.040.C199 – CCS 4 x iPOS360x SXD (Complete cable set, 100 cm, for the MBX 4-axis system: power, RS232, CAN, motor, diff. encoder feedback, I/O)
P034.002.E001 – EasyMotion Studio II (software)
iPOS360x SX-CAN 4-Axis Motion System CANopen/Ethernet
Hochmodulare und kompakte Trägerplatine, die mit bis zu 4 Antriebsreglern vom Typ iPOS360x VX-CAN ausgestattet werden kann.
Versorgungsspannung: 9-36 VDC
Ausgangsstrom pro Achse:
iPOS3604 VX-CAN: 4 A Dauer-, 10 A Spitzenstrom
iPOS3602 VX-CAN: 2 A Dauer-, 3.2 A Spitzenstrom
Motortypen:
Bürstenlose Gleichstrommotoren (BLDC-, PMSM-Motoren)
Bürstenbehaftete Gleichstrommotoren (DC-Motoren)
Direktantriebe (Linear- und Torquemotoren)
Voice Coil Aktuatoren (Tauchspulen)
Schrittmotoren (2- oder 3-phasige)
Feedbackmöglichkeiten:
Inkrementalgeber
SinCos 1Vss
Digitale Hallsensoren
Analoge Hallsensoren
Ansteuerung:
Über Feldbus, Takt/Richtung oder Analog-/Digitaleingänge.
Standalone durch autonome Ausführung komplexer Bewegungsabläufe direkt aus dem nichtflüchtigen Speicher des Controllers.
Kommunikation:
RS232 – bis zu 115 k
CANopen – gemäß den CiA-Profilen 301, 305 und 402
TMLCAN – Technosofts proprietäres CAN Protokoll
EtherNet – optional über ein Zusatzmodul
Digitale und analoge Ein-/Ausgänge:
4 x 5 digitale Eingänge: 5-36 V, NPN
4 x 4 digitale Ausgänge: 5-36 V, 0.5 A, NPN
4 x 2 analoge Eingänge: 12 Bit, 0-5 V
Sicherheit: Schutzeinrichtungen gegen Überstrom, Übertemperatur, Unter- und Überspannung, I2t und Schleppfehler.
Regeleigenschaften:
Sinuskommutierung mit feldorientierte Regelung (FOC) über Encoder, Hallsensoren oder Sensorlos.
Schnelle und hochpräzise kaskadierte Regelkreise mit frei einstellbaren Abtastraten und PWM-Schaltfrequenz bis 100 kHz
Hervorragende Resonanz- und Schwingungsunterdrückung durch den gleichzeitigen Einsatz von bis zu 2 Notch-, Tiefpass-, Hochpass- oder Bandpassfiltern.
Steuerung von Schrittmotoren im closed-loop (FOC) oder im open-loop mit 1/512-µSchritt, Schrittverlusterkennung und automatischer Positionsausgleich.
Betriebsmodis:
Positions- ,Drehzahl- und Drehmomentregelung
Pfadgenerator mit Trapez- und Sinusrampen
Profile Position Mode, Velocity Mode, Homing Mode
Interpolated Position mit lineare (PT) und kubische Splines (PVT)
Cyclic Synchronous Position (CSP)
Elektronische Getriebe (EGEAR) und Kurvenscheiben (ECAM)
Motion-Contouring über Position, Geschwindigkeit, Drehmoment oder Spannung
Analoge Kommandierung, Takt/Richtung
EasyMotion Studio-Software:
Grafische Programmieroberfläche mit vielen Funktionen und Wizards für die einfache Inbetriebnahme, Konfiguration und lokale Programmierung komplexer Ablaufprogrammen auf Einachs- oder Mehrachssysteme.
Ermöglicht die Auswahl von Motortechnologie, Encoder-Schnittstelle und Steuerungsstruktur sowie die Einstellung von Schutz- und Reglerparameter.
Erweiterte Analyse- und Optimierungs-Tools über die vorhandenen Control-Panels, Logger und Scopefunktionalität.
Automatische Ermittlung der PID-Reglerparameter (Autotuning).
TML Bibliotheken: Zur Anbindung an PCs, SPS und µController verfügt Technosoft über verschiedene Bibliotheken – beispielsweise für Linux, Delphi, Visual Basic, C++, C# oder LabView. Mit ihrer Hilfe können die Technosoft-Antriebsregler in vorhandene Systeme ohne Probleme eingebunden werden. Das Protokoll ist TML und die Kommunikation kann über RS232, CAN-Bus, Ethernet oder USB erfolgen.
Technosoft Motion Language (TML): Über die sehr flexible TML-Programmiersprache lassen sich verschiedene Betriebsarten, Bewegungsprofile, Referenzfahrten oder die Steuerung von komplexen Ablaufprogrammen graphisch programmieren und autonom aus dem nichtflüchtigen Speicher des Controllers ausführen. Die Antriebsregler können analoge und digitale E/A Signale verarbeiten, arithmetische und logische Operationen berechnen, Sprung- und Funktionsaufrufe, Ereignisse und Interrupt Routinen (ISR) ausführen sowie auch Daten und Befehle zwischen den Achsen austauschen. Einachs- und Mehrachs-Stand-Alone-Anwendungen lassen sich mit selbsterstellten Ablaufprogrammen einfach realisieren, auch ohne den Einsatz einer komplexen CANopen- oder EtherCAT-Mastersteuerung.
MotionChip™ Technologie: Hauptkern aller Technsoft Servoregler ist der MotionChip™ – ein intelligenter frei programmierbar Controller speziell für komplexe Motion-Control-Aufgaben konzipiert. Der MotionChip™ bietet die Möglichkeit, den leistungsstarken digitaler Signalprozessor (DSP) von Texas Instruments als unabhängige, intelligente Einheit einzusetzen. Dadurch werden viele Aufgaben einer komplexen Mastersteuerung direkt vom dem MotionChip™ gelöst, sodass die globale Funktion einer Maschine entlastet und damit das Management einer Master-Applikation gut optimiert werden kann. Alle wichtigen Steuerungs-Funktionen eines Reglers wie etwa eine Vielzahl von Betriebsmodi, SPS-Eigenschaften, Schutz- und Sicherheitsfunktionen sowie auch Support für die unterschiedliche Schnittstellen- und Motortechnologien sind auf dem MotionChip™ untergebracht, und ermöglichen somit einen flexiblen Einsatz in den verschiedensten Antriebssystemen.• Motion-System mit bis zu 4 iPOS360x VX-CAN Antriebsregler
• Zur Ansteuerung von DC-, BLDC-, Linear- oder Schrittmotoren
• Leistungsspannung: 9-36 VDC; Logikspannung: 7-36 VDC
• Ausgangsstrom/Achse: 4 A Dauer-, 10 A Spitzenstrom
• RS232, TMLCAN, CANopen (CiA301, 305 & 402) und Ethernet
• Inkrementalgeber, SinCos (1Vss), Digitale- und Analoge-Hallsensoren
• Abmessungen (L x B x H): 98 x 100.3 x 21.2 mm- Analog Inputs:
- 4x2
- Supply Voltage:
- 12 V,24 V,36 V
- Communication:
- RS-232,CANopen / TMLCAN,Ethernet
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Digital Inputs:
- 4x5
- 4x4
- Digital Outputs:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Motion Control:
- 4x4 A
- Output Current - Nominal:
- Incremental,1Vpp Sin/Cos,Digital Halls,Analog Halls,Tacho,Sensorless
- Sensors:
- Peak Current:
-
iPOS360x SX
Datenblätter
iPOS3604 VX-CAN
Datenblätter
iPOS3604 VX-CAN
Datenblätter
iPOS360x SX-CAN
Kabel-Set -
iPOS360x SX
Benutzerhandbuch - EasyMotion Studio II
TML Motion Bibliotheken
CANopen Handbuch (ESM I)
CANopen Handbuch (ESM II)
CANopen EDS-Datei
3D model (*.step) -
iPOS360x SX
Anschlusspläne - P028.002.E884 – iPOS360x MBX-CAN motherboard (4 axes, iPOS360x VX, CAN)
P028.002.E894 – iPOS360x MBX-NET motherboard (4 axes, iPOS360x VX, Ethernet compatible)
P038.022.E001 – ENET-VX interface (Ethernet plug-in)
P028.040.C179 – HC 4 x iPOS360x SX (housing & crimp pin set for the MBX 4-axis motherboard)
P028.040.C198 – CCS 4 x iPOS360x SXE (Complete cable set, 100 cm, for the MBX 4-axis system: power, RS232, CAN, motor, single-ended encoder feedback, I/O)
P028.040.C199 – CCS 4 x iPOS360x SXD (Complete cable set, 100 cm, for the MBX 4-axis system: power, RS232, CAN, motor, diff. encoder feedback, I/O)
P034.002.E001 – EasyMotion Studio II (software)