The “Slave Management” dialog allows you to program the motion controller to initialize the slaves, configure the slaves when to report their status and to manage TML functions stored on the slave drives/motors
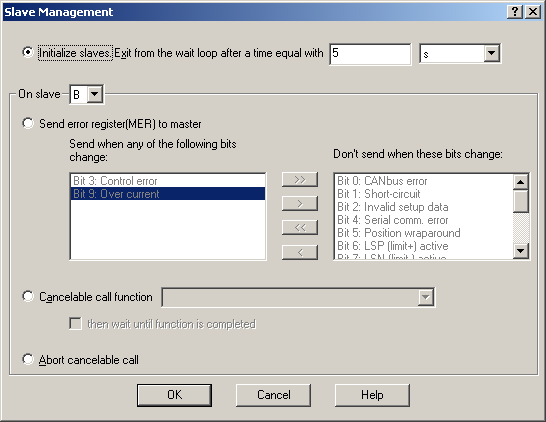
Select Initialize slaves to program the initialization sequence for all the slaves. The motion controller will send the initialization messages to all the slaves selected from the Axis Selection View. The motion controller application will remain in a wait loop until all the slaves signal the end of initialization or the time limit elapses. The time limit for initialization sequence to complete is set in the Exit from the wait loop after a time equal with field. The initialization status of the slave is stored by the motion controller in the SSR register.
Remark: If the time limit is set to zero then the motion controller will wait until all the slaves complete the initialization sequence.
For each selected slave you can:
| • | configure the error conditions for which it will report the Motion Error Register automatically to the motion controller. |
| • | execute a TML function stored in the EEPROM of the slave axis |
| • | cancel the execution of a TML function on a slave axis |
Select Send error register (MER) to master to enable the slave to transmit the MER register when a bit changes. If Int12 – Error on slave has occurred is enabled the motion controller will execute specific code for error handling.
From the right list, select a bit whose change you want to trigger a message transmission and press the [ < ] button. The selected bit will appear on the left list. Repeat the operation for the other bits. Use the button [<<] to select all the bits. Choose a bit from the left list and press the [ > ] button to move it back to the right list. Use the [>>] button to remove all the bits from the left list.
Select Cancelable call function to start the execution on the slave of a TML function stored in the slave’s EEPROM. EasyMotion Studio populates the function list with the functions defined in the slave application through the Functions View.. The motion controller can remain in a wait loop until the function completes when the then wait for function to complete option is checked.
Select Abort cancellable call to terminate the execution of a TML function on the slave axis.
OK: Close this dialogue and save the operations selected in your motion sequence list.
Cancel: Close this dialogue without saving anything in your motion sequence list.
Help: Open this help page.
See also: