- « Back to Catalog
iPOS360x SY-CAN 6-Axis Motion System CANopen/EtherCAT
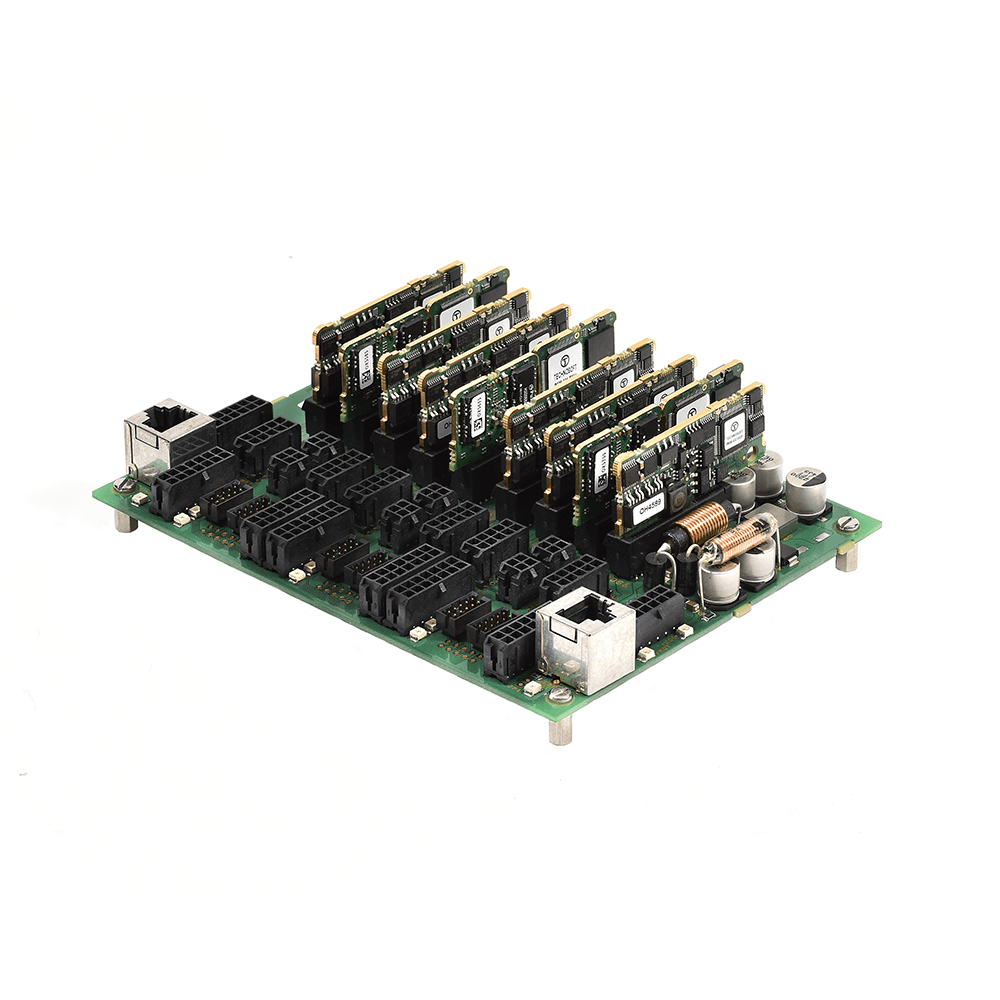
Système à 6 axes sur base iPOS3602 ou iPOS3604
Pour moteurs avec ou sans balais et pas-à-pas
Alimentation moteur / logique: 12-36 V
Jusqu’à 4 A continu, 10 A pic par axe
Communication EtherCAT ou CAN avec l’hôte
RS-232 pour la configuration
- Solution compacte (160 x 122 x 37 mm) prête à l`emploi pour 2-6 axes.
Alimentation: moteur/puissance: +12 à +36 Vdc; Logique: +12 à +36 Vdc
Courant de sortie:
avec iPOS3604: 4 A continu (mode BLDC), 10 A pic par axe
avec iPOS3602: 2 A continu (mode BLDC), 3,2 A pic par axe
Communication:
EtherCAT avec protocole CoE (version EtherCAT)
CAN-bus jusqu`à 1 Mo / s (version CAN) avec les protocoles CANopen (CiA301, 305, 402) et TMLCAN Technosoft, sélectionnables par un cavalier
RS-232 jusqu`à 115 k
Protocoles CAN: CANopen (CiA301 v4.2, DSP305 v2.2, DSP402 v3.0) ou TMLCAN Technosoft, sélectionnable par un cavalier
Options de livraison: 1-6 variateurs intelligents iPOS3602 VX ou iPOS3604 VX, chacun offrant:
Commande haute performance de moteurs rotatifs ou linéaires avec ou sans balais ou pas-à-pas
Commande sinusoïdale (FOC) ou trapézoïdale (Hall) des moteurs sans balais
Commande en boucle ouverte (jusqu`à 256 micro-pas/pas) ou en boucle fermée de moteurs pas-à-pas biphasés et triphasés
Commande en position, vitesse ou couple
Options de rétroaction: codeurs incrémentaux ou différentiels RS-422, codeurs sinus / cosinus 1 Vpp, capteurs Hall numériques ou linéaires
Modes de fonctionnement: profils de position et de vitesse; PVT et PT interpolés, engrenage et came électronique, référence externe: analogique ou envoyée via un bus de communication
Programmation de mouvement en TML (Technosoft Motion Language) ou à l`aide des bibliothèques de fonctions pour Windows (VC / VB / Labview), Linux et divers PLC
Fonctionnement autonome de programmes de mouvement complets résidant dans la mémoire du variateur
5 entrées numériques: 5-36 V (compatibles avec les sorties NPN): Enable, 2 fins de course et 2 universelles
3 sorties numériques, 5-36 V, 0,2 A: Prêt, Erreur, 1 universelle
2 entrées analogiques: 12-bit, 0-5 V: référence, feedback ou universelle
Codeurs supportés:
Codeur incrémental quadruple (monotour, collecteur ouvert et différentiel)
Codeur incrémental analogique sinus / cosinus (différentiel 1 Vpp)
Capteurs Hall numériques et linéaires
Configuration et programmation faciles avec la plate-forme logicielle EasyMotion Studio
Protection contre les surintensités, courts-circuits, défauts à la terre, sur- ou sous-tensions, I2t, erreurs de commande - Supply Voltage:
- 12 V,24 V,36 V
- Output Current - Nominal:
- 6x4 A
- Peak Current:
- Communication:
- RS-232,CANopen / TMLCAN,EtherCAT
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Sensors:
- Incremental,1Vpp Sin/Cos,Digital Halls,Analog Halls,Tacho,Sensorless
- Motion Control:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Digital Inputs:
- 6x5
- Digital Outputs:
- 6x4
- Analog Inputs:
- 6x2
-


iPOS360x SY-CAN
Fiche technique
iPOS360x SY-CAT
Fiche technique
iPOS360x SY-CAN/CAT
Set de câbles - EasyMotion Studio II
TML Motion Librairies
Brochure (CAN version)
Brochure (EtherCAT version)
CANopen manuel de programmation (ESM I)
CANopen manuel de programmation (ESM II)
Ehtercat (CeO) manuel de programmation (ESM I)
Ehtercat (CeO) manuel de programmation (ESM II)
CANopen EDS fichiers
Ethercat - Fichier ESI (XML)
3D model (*.step) -


iPOS360x SY-CAN
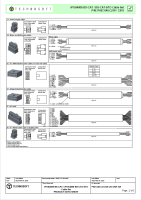
Diagramme de connexion

iPOS360x SY-CAT
Diagramme de connexion - P028.023.E606 – iPOS360x SY-CAT G3 multi-axes system, 6x3604, EtherCAT
P028.024.E606 – iPOS360x SY-CAN G3 multi-axes system, 6x3604, CAN
P038.021.E001 – ECAT-VX interface (EtherCAT, plug-in)
P038.021.E000 – ECAT-VX bridge PCB (EtherCAT, plug-in)
P028.040.C399 – CCS 6 x iPOS360x SXD G3 (Complete cable set, 100 cm, for the MBX 6-axis w. different encoders)
P028.040.C398 – CCS 6 x iPOS360x SXE G3 (Complete cable set, 100 cm, for the MBX 6-axis w. single-ended encoder)
P028.040.C269 – HC 6 x iPOS360x SX-CAN G3 (housing & crimp pin set for the CAN 6-axis system, G3)
P028.040.C259 – HC 6 x iPOS360x SX-CAT G3 (housing & crimp pin set for the EtherCAT 6-axis system, G3)
P034.002.E001 – EasyMotion Studio II (software)
iPOS360x SY-CAN 6-Axis Motion System CANopen/EtherCAT
- Solution compacte (160 x 122 x 37 mm) prête à l`emploi pour 2-6 axes.
Alimentation: moteur/puissance: +12 à +36 Vdc; Logique: +12 à +36 Vdc
Courant de sortie:
avec iPOS3604: 4 A continu (mode BLDC), 10 A pic par axe
avec iPOS3602: 2 A continu (mode BLDC), 3,2 A pic par axe
Communication:
EtherCAT avec protocole CoE (version EtherCAT)
CAN-bus jusqu`à 1 Mo / s (version CAN) avec les protocoles CANopen (CiA301, 305, 402) et TMLCAN Technosoft, sélectionnables par un cavalier
RS-232 jusqu`à 115 k
Protocoles CAN: CANopen (CiA301 v4.2, DSP305 v2.2, DSP402 v3.0) ou TMLCAN Technosoft, sélectionnable par un cavalier
Options de livraison: 1-6 variateurs intelligents iPOS3602 VX ou iPOS3604 VX, chacun offrant:
Commande haute performance de moteurs rotatifs ou linéaires avec ou sans balais ou pas-à-pas
Commande sinusoïdale (FOC) ou trapézoïdale (Hall) des moteurs sans balais
Commande en boucle ouverte (jusqu`à 256 micro-pas/pas) ou en boucle fermée de moteurs pas-à-pas biphasés et triphasés
Commande en position, vitesse ou couple
Options de rétroaction: codeurs incrémentaux ou différentiels RS-422, codeurs sinus / cosinus 1 Vpp, capteurs Hall numériques ou linéaires
Modes de fonctionnement: profils de position et de vitesse; PVT et PT interpolés, engrenage et came électronique, référence externe: analogique ou envoyée via un bus de communication
Programmation de mouvement en TML (Technosoft Motion Language) ou à l`aide des bibliothèques de fonctions pour Windows (VC / VB / Labview), Linux et divers PLC
Fonctionnement autonome de programmes de mouvement complets résidant dans la mémoire du variateur
5 entrées numériques: 5-36 V (compatibles avec les sorties NPN): Enable, 2 fins de course et 2 universelles
3 sorties numériques, 5-36 V, 0,2 A: Prêt, Erreur, 1 universelle
2 entrées analogiques: 12-bit, 0-5 V: référence, feedback ou universelle
Codeurs supportés:
Codeur incrémental quadruple (monotour, collecteur ouvert et différentiel)
Codeur incrémental analogique sinus / cosinus (différentiel 1 Vpp)
Capteurs Hall numériques et linéaires
Configuration et programmation faciles avec la plate-forme logicielle EasyMotion Studio
Protection contre les surintensités, courts-circuits, défauts à la terre, sur- ou sous-tensions, I2t, erreurs de commande Système à 6 axes sur base iPOS3602 ou iPOS3604
Pour moteurs avec ou sans balais et pas-à-pas
Alimentation moteur / logique: 12-36 V
Jusqu’à 4 A continu, 10 A pic par axe
Communication EtherCAT ou CAN avec l’hôte
RS-232 pour la configuration- Analog Inputs:
- 6x2
- Supply Voltage:
- 12 V,24 V,36 V
- Communication:
- RS-232,CANopen / TMLCAN,EtherCAT
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Digital Inputs:
- 6x5
- 6x4
- Digital Outputs:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Motion Control:
- 6x4 A
- Output Current - Nominal:
- Incremental,1Vpp Sin/Cos,Digital Halls,Analog Halls,Tacho,Sensorless
- Sensors:
- Peak Current:
-
iPOS360x SY-CAN
Fiche technique
iPOS360x SY-CAT
Fiche technique
iPOS360x SY-CAN/CAT
Set de câbles - EasyMotion Studio II
TML Motion Librairies
Brochure (CAN version)
Brochure (EtherCAT version)
CANopen manuel de programmation (ESM I)
CANopen manuel de programmation (ESM II)
Ehtercat (CeO) manuel de programmation (ESM I)
Ehtercat (CeO) manuel de programmation (ESM II)
CANopen EDS fichiers
Ethercat - Fichier ESI (XML)
3D model (*.step) -
iPOS360x SY-CAN
Diagramme de connexion
iPOS360x SY-CAT
Diagramme de connexion - P028.023.E606 – iPOS360x SY-CAT G3 multi-axes system, 6x3604, EtherCAT
P028.024.E606 – iPOS360x SY-CAN G3 multi-axes system, 6x3604, CAN
P038.021.E001 – ECAT-VX interface (EtherCAT, plug-in)
P038.021.E000 – ECAT-VX bridge PCB (EtherCAT, plug-in)
P028.040.C399 – CCS 6 x iPOS360x SXD G3 (Complete cable set, 100 cm, for the MBX 6-axis w. different encoders)
P028.040.C398 – CCS 6 x iPOS360x SXE G3 (Complete cable set, 100 cm, for the MBX 6-axis w. single-ended encoder)
P028.040.C269 – HC 6 x iPOS360x SX-CAN G3 (housing & crimp pin set for the CAN 6-axis system, G3)
P028.040.C259 – HC 6 x iPOS360x SX-CAT G3 (housing & crimp pin set for the EtherCAT 6-axis system, G3)
P034.002.E001 – EasyMotion Studio II (software)