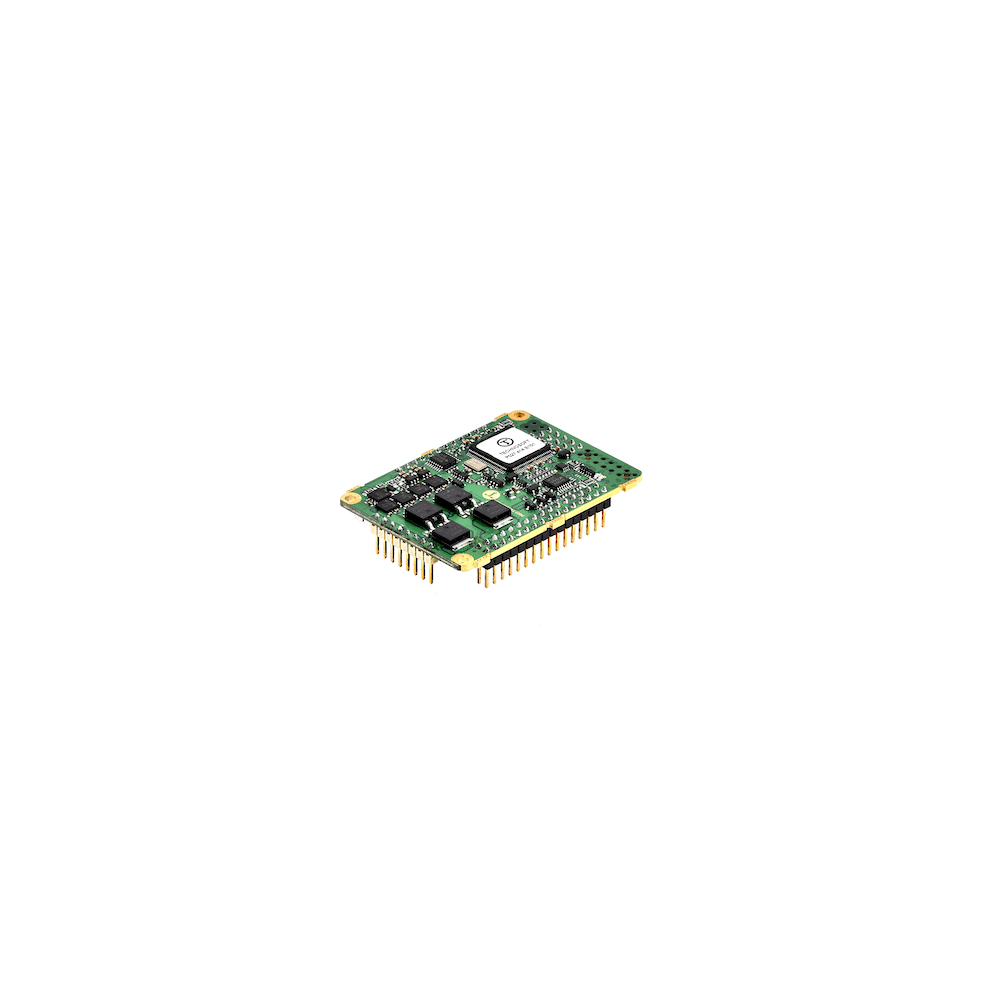
Technosoft vient d’ajouter un nouveau membre puissant à sa famille de variateurs intelligents iPOS: l’iPOS4808 MY.
Comme tous les autres entraînements Technosoft, l’iPOS4808 MY intègre des fonctions de commande moteur avancées, ainsi que des fonctions de contrôle de mouvement et d’automate programmable, le tout dans un module enfichable.
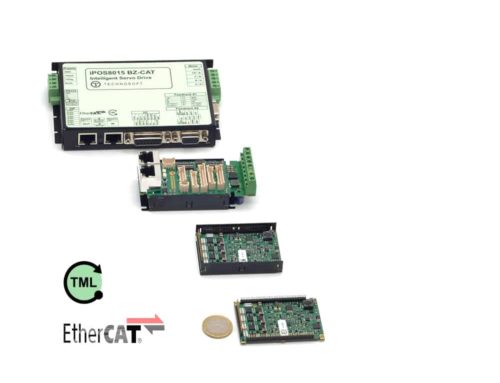
Le nouveau variateur (60 x 43,6 x 12,4 mm), équipé d’interfaces CAN/CANopen et, en option, EtherCAT, offre une solution compacte, flexible et économique adaptée au contrôle décentralisé/coordonné de tous les modèles de moteurs rotatifs ou linéaires (brushless, c.c. à balais ou pas-à-pas), de puissances allant jusqu’à 400 W à une tension nominale de 50 V.
Pour les applications de positionnement haut de gamme, l’iPOS4808 MY prend en charge la configuration du retour à double boucle, ainsi que les interfaces intégrées pour les codeurs BiSS / SSI. Un processeur MotionChip plus rapide, associé à une mémoire de programme et de données plus volumineuse que ses prédécesseurs, permet à l’iPOS4808 MY de proposer de puissants algorithmes de contrôle comprenant plusieurs filtres bi-quad pour une trajectoire de mouvement améliorée avec rejet de résonance. Des routines de configuration de réglage automatique sont en cours de développement pour la mise en service rapide de tout moteur à partir des différentes technologies prises en charge.
La configuration du variateur, le réglage et la programmation des mouvements sont simples avec le logiciel EasyMotion Studio et et le langage TML (Technosoft Motion Language). Grâce à son intelligence intégrée, l’iPOS4808 MY est un variateur intelligent, programmable par l’utilisateur. Dans les systèmes qui demandent un hôte, les variateurs iPOS fonctionnent en tant qu’esclave intelligent exécutant des séquences de mouvements déclenchées par des lignes d’entrée ou des commandes reçues via RS-232, CAN ou EtherCAT.
Les profils de positionnement avancés tels que le PVT ou la came électronique, les E / S et le contrôle du flux du programme, le transfert de données entre les axes, les sous-programmes, les routines d’interruption ISR et les modes de prise de référence facilitent la tâche de mise en œuvre de l’application de mouvement.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}