The “Motion – Homing” dialogue allows you choose a homing procedure and set its parameters. The homing is a sequence of motions, usually executed after power-on, through which the load is positioned into a well-defined point – the home position. Typically, the home position is the starting point for normal operation.
The search for the home position can be done in numerous ways. Therefore, a lot of homing procedures are possible. Technosoft provides for each intelligent drive/motor a collection of up to 32 homing procedures. These are predefined TML functions, which you may call after setting the homing parameters. You may use these homing procedures as they are, or you may modify them according with your application needs. From the list with all the defined homing procedures you can choose one or several to be used in your application. This represents the list of selected homing procedures.
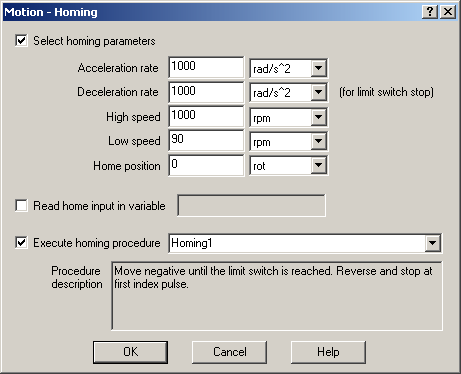
Check Select homing parameters to set the following values:
| • | Acceleration/deceleration rate for the position or speed profiles done during homing |
| • | Deceleration rate for quick stop when a limit switch is reached |
| • | High/normal speed for the position or speed profiles done during homing |
| • | Low speed for the final approach towards the home position |
| • | New home position set at the end of the homing procedure |
Check Execute homing mode and choose a homing procedure from the list of the selected homing procedures. During the execution of a homing sequence SRL.8 = 1. Hence you can find when a homing sequence ends, either by monitoring bit 8 from SRL or by programming the drive/motor to send a message to your host when SRL.8 changes. As long as a homing sequence is in execution, you should not start another one. If this happens, the last homing is aborted and a warning is generated by setting SRL.7 = 1.
Remark: You can abort a homing sequence execution at any moment using TML command ABORT (see Decisions).
You can also use this dialogue to read the status of the home input. The home input is one of the drive/motor inputs, which is used by the homing procedures. The home input is specific for each product and based on the setup data, EasyMotion Studio automatically generates the TML code for reading the correct input. Check Read home input in the variable and fill the associated field with the name of the variable. After execution, the value of the variable will be 0 if the home input is zero (low) or 1 if the home input is 1 (high).
Remark: The source of the motion sequence for reading the home input is general and independent. The particular value of the home input, specific for each product, occurs only in the compiled version of this motion sequence, in the TML code generated. Therefore, you can safely import the source code of this motion sequence into other applications where the target products have different home inputs.
OK: Close this dialogue and save the settings in your motion sequence list.
Cancel: Close this dialogue without saving the settings in your motion sequence list.
Help: Open this help page.
See also:
Homing – TML Programming Details
Homing – Related TML Instructions and data
Internal Units and Scaling Factors