This dialogue allows you to set the event: when a motion is completed. You can use, for example, this event to start the next move only after the actual one is finalized.
The motion complete condition is set in the following conditions:
| • | During position control: |
| ▪ | With position feedback – when the position reference arrives at the position to reach (commanded position) and the position error remains inside a settle band for a preset stabilize time interval |
| ▪ | Without position feedback (open-loop systems) – when the position reference arrives at the position to reach (commanded position) |
| • | During speed control, when the speed reference arrives at the commanded speed |
The motion complete condition is reset when a new motion is started.
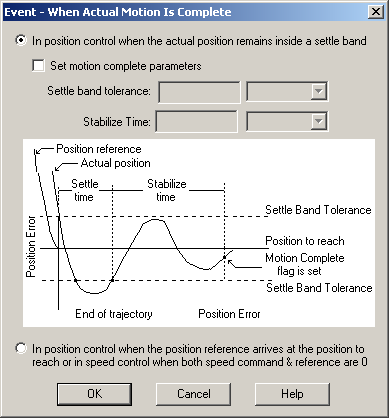
In position control, choose In position control when the actual position remains inside a settle band for the first option. Check Set motion complete parameters if you want to modify the Settle band tolerance and the Stabilize time values. Select the measuring units from the list on the right. Leave Set motion complete parameters unchecked if you want to keep the motion complete parameters unchanged.
Choose In position control when the position arrives at the position to reach or in speed control when speed command & reference are equal in:
| • | Speed control |
| • | Position control with open-loop configurations or if you do not want to use first option |
OK: Close this dialogue and save the event set
Cancel: Close this dialogue without saving the event set.
Help: Open this help page.
See also:
Events – When actual motion is completed– TML programming details