- « Back to Catalog
iPOS3604 MX-CAN 9-36V 4A 144W CANopen/EtherCAT
Variateur numérique, taille réduite, contrôleur intégré
Pour moteurs avec ou sans balais et pas-à-pas
Alimentation moteur / logique: 12-36 V
Courant de sortie: 4 A (pointe à 10 A)
TMLCAN & CANopen (par défaut); EtherCAT (optionnel)
Carte PCB enfichable horizontalement
Dimensions: 55 x 26,4 x 13,1 mm
- Connecteurs standard d`embase
Commande sinusoïdale (FOC) ou trapézoïdale (Hall) des moteurs sans balais
Commande en boucle ouverte ou en boucle fermée de moteurs pas-à-pas biphasés et triphasés
Différents modes de fonctionnement: contrôle du couple, de la vitesse ou de la position; profils de position ou de vitesse; référence analogique externe, ou envoyée via un bus de communication
Ensemble d`instructions TML pour la définition et l`exécution de séquences de mouvements
Fonctionnement autonome avec des séquences de mouvement mémorisées
Communication:
Série RS-232
CANopen (Norme CiA DS 402) ou Technosoft TMLCAN
EtherCAT (avec CoE), via un module d`extension supplémentaire (en option)
E/S numériques et analogiques:
5 entrées numériques: 5-36 V, NPN (Activer, 2 interrupteurs fin de course et 2 entrées universelles)
4 sorties numériques: 5-36 V, 0,5 A, NPN collecteur ouvert (prêt, erreur, 2 à usage général)
1 entrée analogique: 12-bit, 0-5 V: référence ou usage général
Codeurs supportés:
Codeur incrémental quadruple (monotour, collecteur ouvert et différentiel)
Codeur incrémental analogique sinus / cosinus (différentiel 1 Vpp)
Capteurs Hall digitaux et linéaires
Configuration et programmation faciles avec la plate-forme logicielle EasyMotion Studio
Protection contre les surintensités, les sur- et sous-tensions, les courts-circuits, I2t, les erreurs de poursuite et la limitation de courant - Supply Voltage:
- 12 V,24 V,36 V
- Output Current - Nominal:
- 4 A
- Peak Current:
- Communication:
- RS-232,CANopen / TMLCAN,EtherCAT
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Sensors:
- Incremental,1Vpp Sin/Cos,Digital Halls,Analog Halls,Tacho,Sensorless
- Motion Control:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Digital Inputs:
- 5
- Digital Outputs:
- 3
- Analog Inputs:
- 1
-

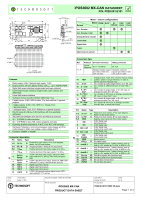
iPOS3604 MX-CAN – Fiche technique

iPOS3604 MX-CAT – Fiche technique -

iPOS3604 MX – User manual
iPOS3604 MX I/O Board – User manual - EasyMotion Studio II
TML Motion Librairies
CANopen manuel de programmation (ESM I)
CANopen manuel de programmation (ESM II)
Ehtercat (CeO) manuel de programmation (ESM I)
Ehtercat (CeO) manuel de programmation (ESM II)
CANopen EDS fichiers
Ethercat - Fichier ESI (XML)
3D model (*.step) -

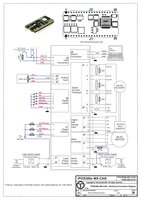
iPOS3604 MX-CAN – Diagramme de connexion
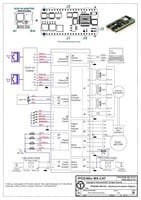
iPOS3604 MX-CAT – Diagramme de connexion - P028.002.E101 – iPOS3604 MX-CAN (36V, 4A, pin-plug, encoder, CAN)
P028.002.E804 – iPOS3604 MX-CAN starter kit, brushless motor
P028.002.E121 – iPOS3604 MX-CAT (36V, 4A, pin-plug, encoder, EtherCAT)
P034.002.E001 – EasyMotion Studio II (software)
iPOS3604 MX-CAN 9-36V 4A 144W CANopen/EtherCAT
- Connecteurs standard d`embase
Commande sinusoïdale (FOC) ou trapézoïdale (Hall) des moteurs sans balais
Commande en boucle ouverte ou en boucle fermée de moteurs pas-à-pas biphasés et triphasés
Différents modes de fonctionnement: contrôle du couple, de la vitesse ou de la position; profils de position ou de vitesse; référence analogique externe, ou envoyée via un bus de communication
Ensemble d`instructions TML pour la définition et l`exécution de séquences de mouvements
Fonctionnement autonome avec des séquences de mouvement mémorisées
Communication:
Série RS-232
CANopen (Norme CiA DS 402) ou Technosoft TMLCAN
EtherCAT (avec CoE), via un module d`extension supplémentaire (en option)
E/S numériques et analogiques:
5 entrées numériques: 5-36 V, NPN (Activer, 2 interrupteurs fin de course et 2 entrées universelles)
4 sorties numériques: 5-36 V, 0,5 A, NPN collecteur ouvert (prêt, erreur, 2 à usage général)
1 entrée analogique: 12-bit, 0-5 V: référence ou usage général
Codeurs supportés:
Codeur incrémental quadruple (monotour, collecteur ouvert et différentiel)
Codeur incrémental analogique sinus / cosinus (différentiel 1 Vpp)
Capteurs Hall digitaux et linéaires
Configuration et programmation faciles avec la plate-forme logicielle EasyMotion Studio
Protection contre les surintensités, les sur- et sous-tensions, les courts-circuits, I2t, les erreurs de poursuite et la limitation de courant Variateur numérique, taille réduite, contrôleur intégré
Pour moteurs avec ou sans balais et pas-à-pas
Alimentation moteur / logique: 12-36 V
Courant de sortie: 4 A (pointe à 10 A)
TMLCAN & CANopen (par défaut); EtherCAT (optionnel)
Carte PCB enfichable horizontalement
Dimensions: 55 x 26,4 x 13,1 mm- Analog Inputs:
- 1
- Supply Voltage:
- 12 V,24 V,36 V
- Communication:
- RS-232,CANopen / TMLCAN,EtherCAT
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Digital Inputs:
- 5
- 3
- Digital Outputs:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Motion Control:
- 4 A
- Output Current - Nominal:
- Incremental,1Vpp Sin/Cos,Digital Halls,Analog Halls,Tacho,Sensorless
- Sensors:
- Peak Current:
-
iPOS3604 MX-CAN – Fiche technique
iPOS3604 MX-CAT – Fiche technique -
iPOS3604 MX – User manual
iPOS3604 MX I/O Board – User manual - EasyMotion Studio II
TML Motion Librairies
CANopen manuel de programmation (ESM I)
CANopen manuel de programmation (ESM II)
Ehtercat (CeO) manuel de programmation (ESM I)
Ehtercat (CeO) manuel de programmation (ESM II)
CANopen EDS fichiers
Ethercat - Fichier ESI (XML)
3D model (*.step) -
iPOS3604 MX-CAN – Diagramme de connexion
iPOS3604 MX-CAT – Diagramme de connexion - P028.002.E101 – iPOS3604 MX-CAN (36V, 4A, pin-plug, encoder, CAN)
P028.002.E804 – iPOS3604 MX-CAN starter kit, brushless motor
P028.002.E121 – iPOS3604 MX-CAT (36V, 4A, pin-plug, encoder, EtherCAT)
P034.002.E001 – EasyMotion Studio II (software)