Technologie
Technosoft a lancé le variateur intelligent comme une solution rentable dans de nombreuses applications de contrôle de mouvement. En intégrant un contrôleur et un entraînement dans une même unité, le variateur intelligent peut exécuter de nombreuses tâches qui sont traditionnellement assignées à une unité centrale. En utilisant TML – un langage de programmation de haut niveau, les variateurs intelligents Technosoft peuvent exécuter indépendamment des programmes de mouvement complexes qui impliquent:
- le réglage de tous les modes de fonctionnement pris en charge
- le contrôle de fonctionnalités logicielles avancées, telles que sauts conditionnels, appels de fonctions, interruptions, boucles d’attente, événements spéciaux
- l’exécution de nombreux modes de repérage standard et personnalisés par l’utilisateur
- la manipulation de toutes les E/S
- des opérations arithmétiques et logiques
- l’utilisation d’un variateur intelligent en tant que «maître d’application», qui contrôle les autres variateurs
- le transfert de données entre axes
- la synchronisation avec les boucles de commande des autres axes.
La prochaine étape était le moteur intelligent, qui intègre un variateur intelligent dans un moteur. Ainsi, le contrôleur de mouvement, l’entraînement et le moteur sont tous regroupés en une seule unité compacte, qui reçoit des commandes de mouvement par un canal de communication et les traduit en mouvements mécaniques.

Schéma d’un variateur intelligent
Schéma d’un variateur intelligent

Schéma d’un moteur intelligent
Schéma d’un moteur intelligent
Le concept MotionChip™
MotionChip™ est un concept avancé de Technosoft réalisé sous forme d’un contrôleur de mouvement prêt-à-rouler de haute performance, basé sur des processeurs dédiés. En utilisant jusqu’à 8 signaux PWM, cette puce peut piloter soit un ou deux ponts H, soit un inverseur triphasé, fournissant une solution à puce unique pour le contrôle des moteurs sans balais, à courant continu, rotatifs ou linéaires, ainsi que des moteurs pas-à-pas biphasés ou triphasés. Les modes opératoires incluent la commande en couple, en vitesse ou en position, avec diverses options comme: le mode c.c. à base de capteurs Hall ou le mode c.a. sinusoïdal basé sur la commande vectorielle pour le contrôle de moteurs sans balais; la boucle ouverte avec micro-pas, ou commande en boucle fermée (vectorielle) des moteurs pas-à-pas. MotionChip™ dispose d’un contrôleur incorporé avec un langage de haut niveau pour la programmation de mouvement: TML (Technosoft Motion Language). Grâce au puissant set d’instructions TML, des applications de mouvement complexes peuvent être programmées directement au niveau du variateur, éliminant dans bien des cas le besoin d’un contrôleur séparé.
Avantages de la technologie TECHNOSOFT
- Solutions de commande compactes et économiques
- Tout en un: contrôleur et entraînement dans la même unité
- Un pour tous: même variateur pour les moteurs à c.c., pas-à-pas, brushless et linéaires
- Intelligence distribuée avec des programmes de mouvement complexes exécutés par les variateurs
- Commande de mouvement avancée (double boucle, PVT, Courbes S, came électronique) à l’aide du langage de programmation
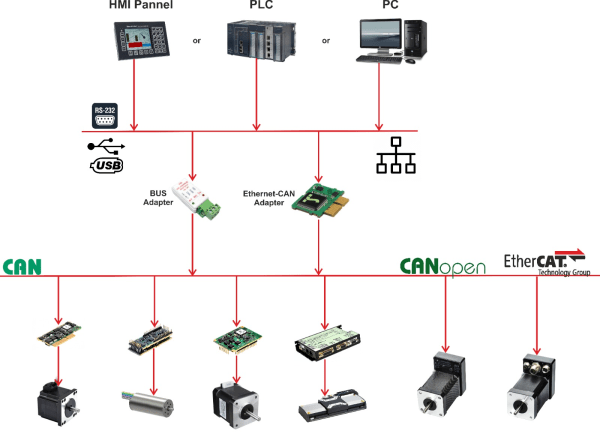
TML (Technosoft Motion Language) - Plusieurs options de communication: RS232, TMLCAN, CANopen, EtherCAT, Ethernet
- Implémentation facile avec les bibliothèques de fonctions de commande pour PC (C/C++, Visual Basic, Delphi, LabVIEW, Linux) and PLC (Simatic S7, Omron CJ1, B&R X20)
- Programmation graphique avec EasyMotion Studio

TMLCAN. CANopen. EtherCAT
Les produits Technosoft avec interface CAN peuvent fonctionner en 2 modes: TMLCAN et CANopen. TMLCAN et CANopen..
En mode TMLCAN, les variateurs et moteurs Technosoft agissent en tant que variateurs ou moteurs intelligents et se conforment au protocole Technosoft pour l’échange de commandes TML via CAN-bus. Lorsque le protocole TMLCAN est utilisé, il n’est pas obligatoire d’avoir un maître. N’importe quel variateur peut être configuré pour fonctionner en mode autonome et peut jouer le rôle de maître pour coordonner les communications et la synchronisation du réseau et l’application de mouvement par des commandes TML envoyées directement aux autres variateurs.
En mode CANopen, Les variateurs et moteurs Technosoft se comportent comme des dispositifs CANopen standard conformes aux profils CiA 301, 305 et 402. Dans ce mode, un maître CANopen est nécessaire pour le contrôle d’application. Les variateurs peuvent encore exécuter des fonctions de mouvement complexes, écrites en TML et stockés dans leur mémoire EEPROM, le maître CANopen ayant la possibilité d’appeler ces fonctions. En utilisant cette approche décentralisée, où le maître CANopen appelle des fonctions à exécuter et attend la confirmation de leur achèvement, le calcul global et les besoins de communication peuvent être sensiblement réduits, ce qui conduit à des solutions meilleures et plus rentables.
La plupart des nouveaux produits des séries iPOS et iMOT offrent les deux options, TMLCAN et CANopen. Grâce à un commutateur matériel, l’un ou l’autre mode est activé après la mise sous tension.
Les produits Technosoft avec interface EtherCAT fonctionnent comme des dispositifs EtherCAT sandard qui se conforment au protocole CAN over EtherCAT (CoE). Comme pour les versions CANopen, les variateurs et moteurs Technosoft peuvent aussi exécuter des fonctions de mouvement complexes, écrites en TML et stockées dans leur mémoire EEPROM, de sorte que le maître EtherCAT a la possibilité d’appeler ces fonctions.
TML: le langage de programmation Technosoft
L’un des principaux avantages des variateurs et moteurs intelligents de Technosoft est leur capacité à exécuter des mouvements complexes sans nécessiter un contrôleur externe. Cela est possible car les variateurs Technosoft proposent, dans un seul boîtier compact, un entraînement numérique à la fine pointe de la technologie et un puissant contrôleur de mouvement. Cela donne à l’utilisateur les options suivantes pour implémenter une application de mouvement:
- En tant que programme de commande autonome, écrit en TML et stocké dans la mémoire non volatile du variateur, qui est exécuté automatiquement après la mise sous tension;
- Dans une unité centrale, où l’application de mouvement est mise en œuvre en utilisant l’une des bibliothèques TML_LIB pour PC ou PLC. Danc ce cas, les commandes TML sont envoyées une à une par un canal de communication;
- En utilisant une approche de commande décentralisée qui combine les options ci-dessus, comme par exemple un hôte appelant des fonctions de mouvement programmées dans les variateurs / moteurs intelligents à l’aide de TML.
TML (Technosoft Motion Language) est un langage de haut niveau qui vous permet de programmer des profils de mouvement complexes pour que le variateur / moteur intelligent s’exécute indépendamment. TML vous permet de:
- Définir les différents modes de fonctionnement: profils de position ou de vitesse, interpolation PVT ou PT, engrenage ou came électronique, référence externe, etc.
- Changer les modes et / ou les paramètres de mouvement à la volée
- Exécuter des modes de repérage standard ou vos propres versions personnalisées
- Contrôler le flux du programme par des:
- Sauts conditionnels et appels de fonctions
- Interruptions générées sur des conditions prédéfinies ou programmables (protections déclenchées, transitions sur interrupteur de fin de course ou entrées de capture, etc.)
- Attentes que les événements programmés se produisent
- Gérer les E/S numériques et les signaux d’entrée analogiques
- Exécuter des opérations arithmétiques et logiques
- Effectuer des transferts de données entre les axes
- Contrôler le mouvement d’un axe depuis un autre axe, via des commandes de mouvement envoyées entre les axes
- Envoyer des commandes à un groupe d’axes (multidiffusion). Cela inclut la possibilité de lancer simultanément des séquences de mouvement sur tous les axes d’un groupe
- Synchroniser tous les axes d’un réseau
Avec TML, vous pouvez réellement distribuer l’intelligence entre un maître et les variateurs / moteurs intelligents dans des applications multi-axes complexes. Ainsi, au lieu d’essayer de commander chaque pas d’un mouvement d’axe, vous pouvez programmer les variateurs / moteurs intelligents, en utilisant TML, pour exécuter des tâches complexes et informer le maître lorsque ces tâches sont effectuées. Ainsi, pour chaque axe, la tâche du maître peut être réduite à appeler des fonctions TML et attendre un message qui confirme la fin de leur exécution. Si nécessaire, les variateurs et moteurs intelligents peuvent également être programmés pour envoyer périodiquement des messages d’information au maître afin de pouvoir suivre la progression d’une tâche.
Grâce à un set d’instructions puissant, la programmation de mouvement en TML est rapide et facile, même pour les applications de mouvement complexes. Il en résulte un programme autonome de haut niveau qui, une fois conçu, peut être ensuite utilisé dans d’autres applications.
La programmation TML peut se faire facilement en EasyMotion Studio. Ce logiciel inclue un Motion Wizard qui vous permet de programmer votre application d’une manière simple et graphique, à travers un ensemble de dialogues de programmation. Lorsqu’un dialogue de programmation a été fermé, les instructions TML associées sont générées automatiquement.