Technosoft drives are intelligent servo drives that can generate the motor trajectory using the embedded motion controller. In the same time, our drives also contain the needed PIDs to enable the motor to follow these user defined motion profiles. The following paragraphs will explain of how they do this:
- Motion Profile Generation
Technosoft drives support various motion profiles to define how a motor moves from one position to another. The most common types include:
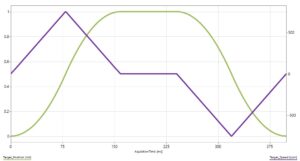
- Trapezoidal profile: Defined by constant acceleration, constant velocity, and constant deceleration. They can be a speed or a position profile based on the project’s requirements.
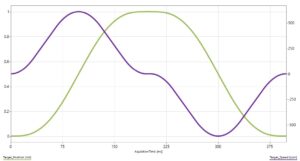
- S-curve profile: Smoothens the acceleration and deceleration to reduce mechanical stress. This motion type enables the user to limit the jerk of the movement. It can be controlled only in position mode, requiring an active position control loop.
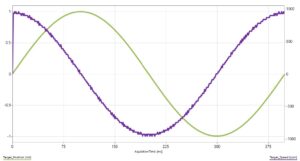
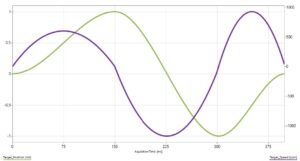
- Sinusoidal profile: Generates a sinusoidal reference for position, speed, torque or voltage motions. More information can be found in our technical paper titled Technosoft drives now feature a new capability to generate a sinusoidal reference for position, speed, torque, or voltage.
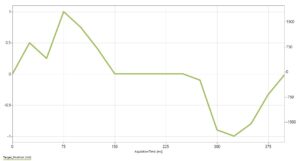
- PT (Position and Time): Allows the programing of a positioning path described through a series of points, which specify the desired position and time.
- PVT (Position, Velocity and Time): This is very similar to PT, but it also permits to input the speed of the motor at every step.
The drive calculates the desired position, velocity, and acceleration values over time using these profiles.
 |
 |
|---|---|
 |
 |
- Setpoint Calculation
Once the profile is selected, the drive internally calculates trajectory points — these are values for position, speed and acceleration — in every slow loop.
- The drive updates the command position or command speed based on the measured parameters.
- These values become the input to the control loop.
- Feedback Use
Technosoft drives use encoders to monitor the motor’s actual position and velocity. This feedback is continuously compared with the internal trajectory to:
- Detect deviations
- Correct errors through PID control
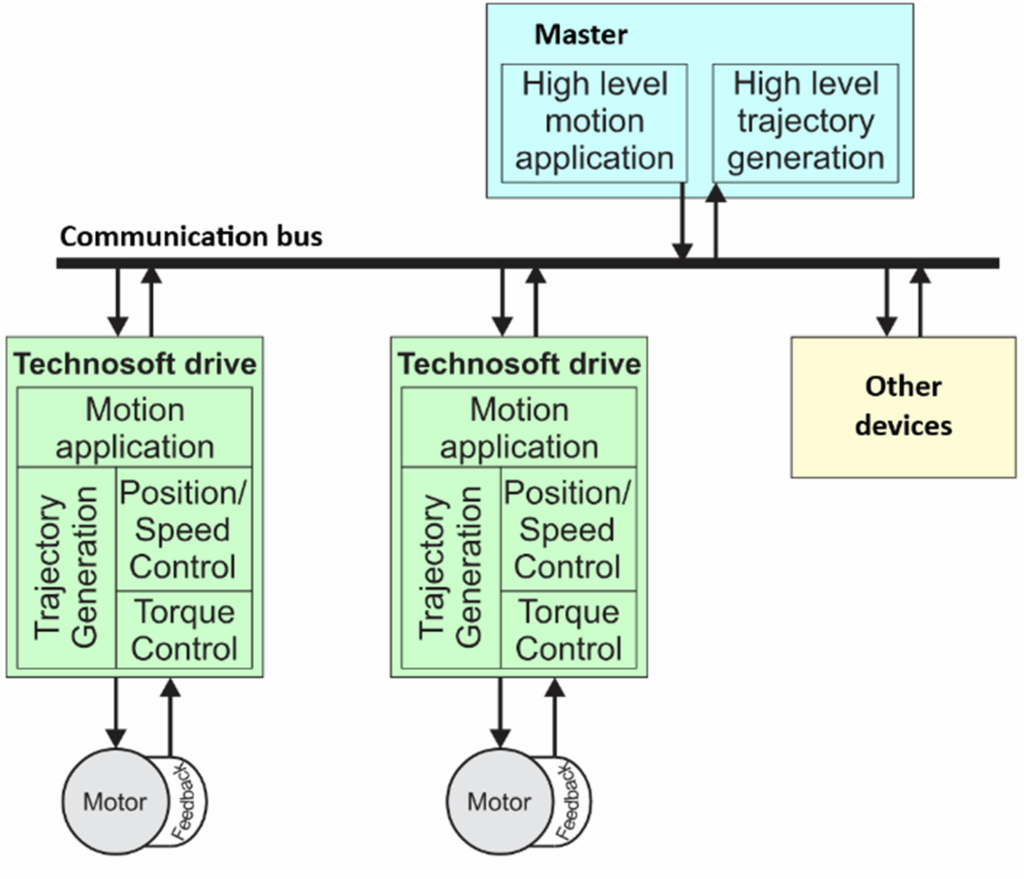
- Distributed intelligence
Technosoft allows splitting the motion application between the Technosoft drives and the master (CANopen, EtherCAT, PLC). Using TML the user can build complex motion applications locally, on each drive, leaving on the master only a high-level motion application and thus reducing the master’s complexity. The master has the overview of the motion application and delegates specific tasks to the Technosoft drives.
For more details on this topic, check out our technical paper on our website titled With embedded motion controllers, our products execute complex motions independently, distributing intelligence between the master and the drives to reduce development time and communication needs.
Summary
Technosoft drives generate their internal trajectories using motion profiles (trapezoidal, S-curve, etc.), calculate position/velocity setpoints in real-time, and regulate motion through internal control loops using feedback. This all happens at the drive’s level, without needing any external supervision.
Contact our team today!




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}