Introduction
In motor control applications, unexpected failures can pose serious safety risks, cause damage to equipment, costly repairs, and disrupt productivity. Therefore, the ability of a system to effectively handle critical errors is essential. Technosoft drives are designed with a robust protection system that combines both hardware and adaptive software, ensuring reliable operation and preventing potential damage during critical situations.
Most important protections:
- Short-circuit protection
This hardware protections safeguards against short-circuits or current spikes between motor phases or between a motor phase and ground. If a short circuit is detected or even a wrong voltage command, the drive stops the PWM output to prevent possible damage to the power stage or motor.
- Encoder broken wire
Technosoft drives feature encoder broken wire protection for added reliability. This protection is available only for setups that include both an incremental encoder and a digital Hall sensor. The drive monitors the encoder data alongside digital Hall sensor transitions. If any of the encoder wires are damaged or disconnected, the drive triggers the fault state, disabling the motor and alerting the user. This protection is vital in environments with mechanical stress or vibrations.
- Control error protection
Control error protections are useful for all applications, particularly those requiring high movement precision regardless if the motor is moving or not. To help in these cases, we offer a protection that can be programmed to react in a desired way(by default it disables the motor) if it moves outside the desired precision range.
The user can set error thresholds for both speed and position, each of them being active depending on how the motor is controlled. These parameters define the maximum allowed difference between the setpoint and feedback values. Beside this, a control error time limit is available in order to account for scenarios where errors might be allowed to exist naturally but only for a short duration, such as starting a heavy load. If the error remains outside the defined ranges (both as time and values), the protection will trigger. The drive will enter the fault state, signaling that a control error occurred, which helps identify the cause and address issues like tuning or potential hardware problems, such as a faulty gear system.
Below is a screenshot from EasyMotion Studio II, where you can see the position and speed control error protection parameters.

- Overcurrent protection
Overcurrent protection is defined by setting a maximum current and a time limit, typically 0.01 seconds. If the motor exceeds the current limit a timer will start and if the current remains above the limit for the duration set, the drive it will enter the fault state and will disable the motor to prevent damage. This protection is essential for any application, as it prevents the motor from drawing too much current and causing potential damages in the system. In EasyMotion Studio II, overcurrent values are automatically calculated based on the motor’s nominal and peak current settings. Users can still adjust these values to meet specific requirements.
- I2t protection
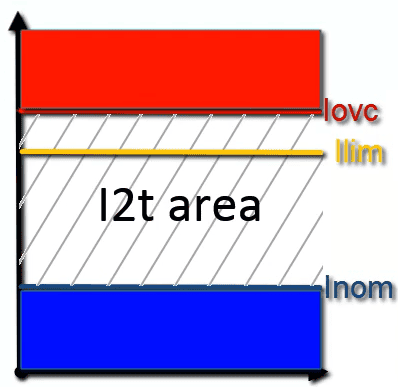
Together with the current limit and the overcurrent protection, the user can define an absolute upper limit when it comes to current that will not be exceeded. Usually, this limit is set significantly higher than the nominal current of the motor to allow for high dynamic performance. What happens then in the situations where the current is higher than the nominal, but not big enough to trigger the overcurrent protection? – the motor temperature will start to rise.
Technosoft drives have a solution for these cases – the I2t protection. It is meant to prevent the motor from overheating during prolonged operation over the nominal current.
The i2t protection works with an I2t current and an I2t time (set by the user in case of the motor or predefined in case of the drive). Together with the nominal value, these points define technically an area that covers exactly the interval between the nominal current and the current limit, while mathematically they define the actual threshold used by the drive (named SI2t).
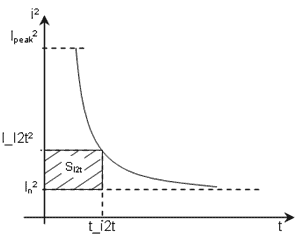
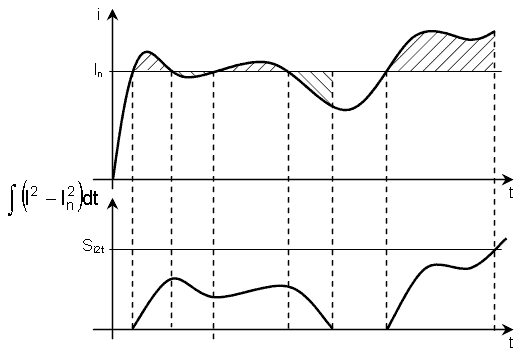
If the motor current is greater than the nominal current In, the difference between the square of the current and the square of the nominal current is integrated dt and compared with the SI2t value. When the integral value reaches the SI2t, the I2t protection is triggered.
It is important to mention that here the drive offers the choice of keeping the motor enabled but with a reduced current (90% of nominal) to allow for the temperature to drop to safe levels or the complete shutdown.
- Thermal protection
Monitors the internal drive temperature and disables the PWM outputs if it exceeds 105°C, preventing damage. This protection is useful where the ambient temperature of the drive can vary greatly and is difficult to control it very precisely.
- Over-voltage & under-voltage protection
Prevents the drive from operating outside allowed voltage range. If the voltage surpasses the upper limit or falls below the lower limit, the drive enters the fault state, disables the motor and signals the outside world via digital outputs and internal registers.
Information about the over-voltage and under-voltage limits as well as other drive related protection limit values, can be found in EasyMotion Studio II project, in the Drive Data section. These values vary by drive model. The following example applies to the iPOS4804 family of drives:
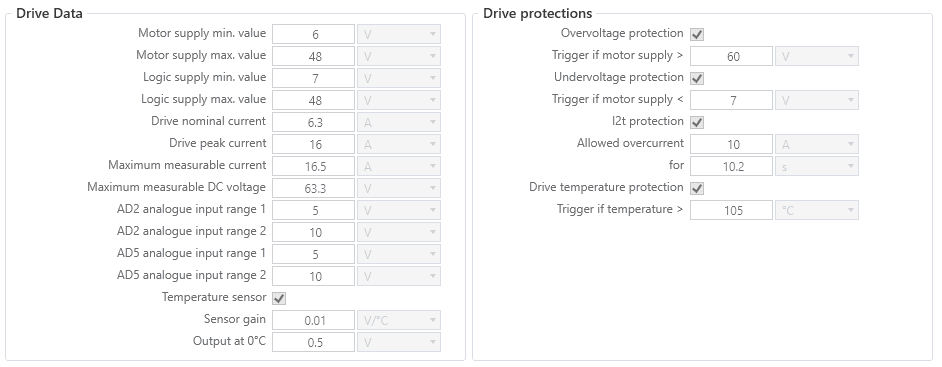
These predefined protections cannot be modified by the user.
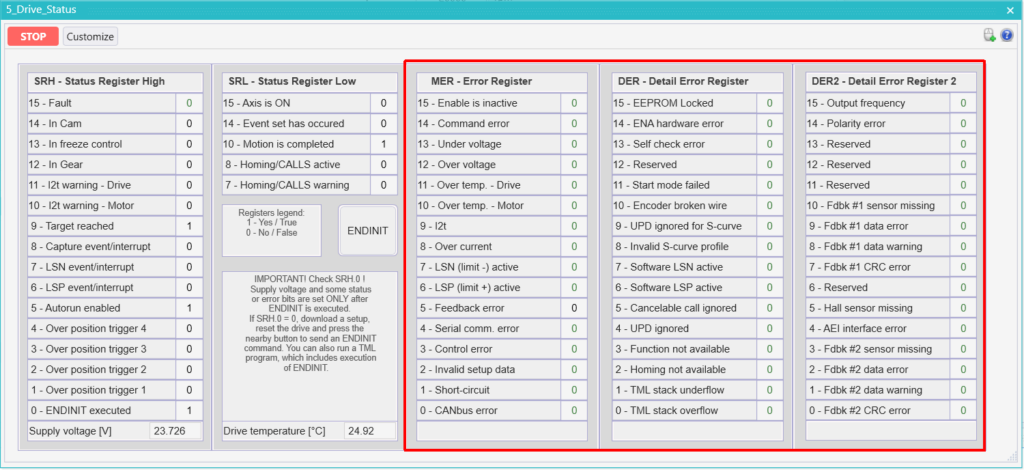
Speaking of EasyMotion Studio II, we should mention that it also gives the user instant access to the state of the drive and hence one can see the status of any protection in a single control panel.
This interface provides real-time information on the error register (MER) along with the details of these errors (via DER / DER2 where applicable).
Conclusion
Technosoft drives feature a robust yet flexible protection system that integrates both hardware and software functionalities to permanently safeguard the system. These protections are automatically triggered in the event of a fault, disabling the drive power stage to prevent potential damage to the system and stopping the execution of the on-going TML program.
Through the Protections and Limits section in the Easy Motion Studio II project, users can visualize and configure the thresholds to suit the specific requirements of their application.
This level of customization does not stop here – the actual drive response in case of a fault condition can be further enhanced as needed using the full power and flexibility of the Technosoft Motion Language (TML). This ensures that Technosoft drives can accurately respond to a wide range of fault scenarios, providing protection and automated response in even the most challenging industrial applications.
Contact our team today!




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}