Syntax
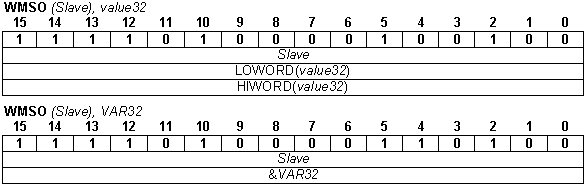
WMSO (Slave), value32 |
Wait for slave’s Motor Speed Over value32 |
WMSO (Slave), VAR32 |
Wait for slave’s Motor Speed Over VAR32 |
| Operands | Slave: slave axis monitored for event occurrence |
VAR32: fixed variable
value32: 32-bit fixed immediate value
![]()
Binary code
| Description | Sets the event condition and halts the execution of the TML program from motion controller until when the motor speed is equal or over the 32-bit value or the value of the specified fixed variable. After you have programmed an event, you can do the following actions: |
| • | Change the motion mode and/or the parameters when the event occurs, with command UPD! |
| • | Stop the motion when the event occurs, with command STOP. |
The programmed event is automatically erased when the event occurs or if the timeout for the wait expires.
| Execution | Activates the monitoring of the event on the slave axis, when motor speed >= value32, respectively VAR32. The motion controller application remains in a loop until the event on the slave axis occurs or it timeouts. This operation erases a previous programmed event that has occurred. |
Example
//Motor is accelerating. Stop motion on all axes when motor
//speed > 600 rpm
//Position feedback: 500 lines encoder (2000 counts/rev)
WMSO (D) 20; //Set event: when motor speed is > 600 rpm
STOP;//Stop the motion when the event occurs