Syntax
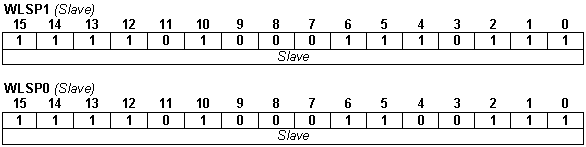
WLSP1 |
Wait for slave’s Limit Switch Positive goes from 0 to 1 |
WLSP0 |
Wait for slave’s Limit Switch Positive goes from 1 to 0 |
| Operands | – |
![]()
Binary code
| Description | Sets the event condition when the programmed transition occurs at the positive limit switch input. After you have programmed an event, you can do the following actions: |
| • | Change the motion mode and/or the parameters when the event occurs, with command UPD! |
| • | Stop the motion when the event occurs, with command STOP. |
The programmed event is automatically erased when the event occurs or if the timeout for the wait expires.
| Execution | Activates monitoring of the event when the programmed transition occurs at the positive limit switch input. This operation erases a previous programmed event that has occurred. |
Example
//Reverse slave C when positive limit switch is reached
//Position feedback: 500 lines encoder (2000 counts/rev)
(C)
CACC = 0.0637; //acceleration rate = 200[rad/s^2]
CSPD = 16.6667; //jog speed = 500[rpm]
MODE SP;
UPD; //execute immediate
}
// Wait for event : When axis C positive limit switch goes low->high
WLSP1 (C);
// Wait for event : When motion is completed on axis (C)
WMC (C); //limit switch is active -> quick stop mode active
// wait until the motor stops because only then the
// new motion commands are accepted
(C)
CSPD = -40; //jog speed = -1200[rpm]
MODE SP; //after quick stop set again the motion mode
UPD; //execute immediate
}