Syntax
WIN#n (Slave), 0 |
Wait for slave’s Input#n is 0 |
WIN#n (Slave), 1 |
Wait for slave’s Input#n is 1 |
| Operands | Slave: slave axis monitored for event occurrence |
n: input line number (0<=n<=39)
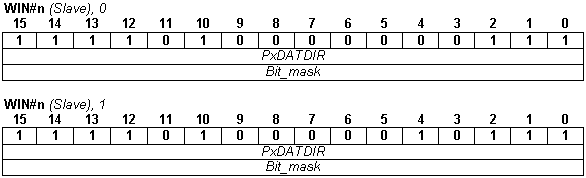
![]()
Binary code
| Description | Sets the event condition and halts the execution of the TML program from motion controller until the slave’s digital input #n becomes 0, respectively 1. The slave checks the condition of the input #n is tested at each slow loop sampling period. After you have programmed an event, you can do the following actions: |
| • | Change the motion mode and/or the parameters when the event occurs, with command UPD! |
| • | Stop the motion when the event occurs, with command STOP. |
The programmed event is automatically erased when the event occurs or if the timeout for the wait expires.
| Execution | Activates monitoring of the event on the slave axis, when the digital input #n becomes 0 (!IN#n 0), respectively 1 (!IN#n 1). The motion controller application remains in a loop until the event on the slave axis occurs or it timeouts. This operation erases a previous programmed event that has occurred. |
Example
// Start motion on slave A when digital input #36 from slave C is high
// Wait for event: When axis C digital input 36/IN36 is high
WIN#36 (C), 1;
(A) {
//Position profile
CACC = 0.3183;//acceleration rate = 1000[rad/s^2]
CSPD = 40.;//slew speed = 1200[rpm]
CPOS = 12000L;//position command = 6[rot]
CPR; //position command is relative
MODE PP;
TUM1; //set Target Update Mode 1
UPD; // execute immediate
}
WMC (A); // wait for motion completion