Syntax
TUM0 |
Set Target Update Mode 0 |
TUM1 |
Set Target Update Mode 1 |
| Operands | – |
![]()
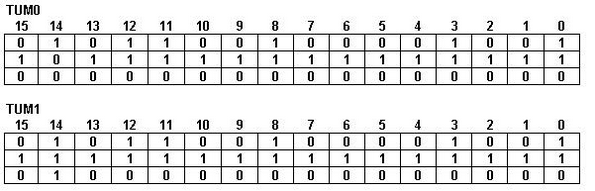
Binary code
| Description | Sets the target update mode 0 or 1. The TUM0 and TUM1 instructions offer 2 choices for starting a new motion mode. |
After a TUM1 command, the reference generator computes the new motion mode trajectory starting from the actual values of position and speed reference.
After a TUM0 command, the reference generator first updates the position and speed references with the actual values of the load position and speed (TPOS=APOS_LD and TSPD=ASPD_LD) and then starts to compute the new motion mode trajectory.
By default, each command setting a motion mode activates the TUM0 mode. In order to activate the TUM1 mode, execute the TML instruction TUM1 AFTER the command setting the motion mode and BEFORE the UPD command.
As a general rule, TUM1 mode is recommended for normal operation. Use TUM0 in the following situations:
| • | Recovery from an error setting AXISOFF command, where significant differences may occur between the last target position and speed values computed by the reference generator before the AXISOFF and the actual values of the load/motor position and speed |
| • | Precise relative positioning from the point where the load/motor has hit a marker – to eliminate the following error |
| • | When you start / stop your motor using only AXISON / AXISOFF commands |
| • | If you switch from a torque control mode (where target position and speed are not computed by the reference generator) to a motion mode performing position or speed control |
Remark: In open loop control of steppers, TUM0 is ignored as there is no position and/or speed feedback
The instructions become effective at the next update command UPD.
Example1:
// Start a position profile with TUM1. Position feedback:
// 500 lines incremental encoder (2000 counts/rev)
CACC = 0.3183; //acceleration rate = 1000[rad/s^2]
CSPD = 33.3333; //slew speed = 1000[rpm]
CPOS = 6000; //position command = 3[rot]
CPR; //position command is relative
SRB ACR 0xFFFF, 0x800; // and additive
MODE PP; // set trapezoidal position profile mode
TUM1; //set Target Update Mode 1
UPD; //execute immediate
Example2:
// Start a position profile with TUM0. Position feedback:
// 500 lines incremental encoder (2000 counts/rev)
CACC = 0.3183; //acceleration rate = 1000[rad/s^2]
CSPD = 33.3333; //slew speed = 1000[rpm]
CPOS = 6000; //position command = 3[rot]
CPR; //position command is relative
SRB ACR 0xFFFF, 0x800; // and additive
MODE PP; // set trapezoidal position profile mode
// No need to set TUM0 before UPD as MODE PP does it automatically
UPD; //execute immediate