In the trapezoidal position profile mode, the motion parameters CPOS, CSPD, CACC can be changed any time during motion. The reference generator automatically re-computes the position trajectory in order to reach the new commanded position, using the new values for slew speed and acceleration.
The figure below shows an example where slew speed and acceleration rate are changed, while the commanded position is kept the same.
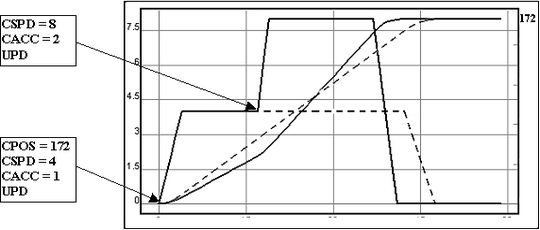
Trapezoidal position profile. On-the-fly change of motion parameters
Programming Example
// Position profile already set. CACC and CSPD
// are changed during motion
CACC = 2; //acceleration rate = 2 [internal units]
CSPD = 8; //slew speed = 8 [internal units]
UPD; //execute immediate
If the trapezoidal position profile is already set and you intend to change only the motion parameters, you don’t need to set again neither the motion mode with TML instruction MODE PP, nor the target update mode 1 (when required) with TML instruction TUM1.
If during motion, a new position command is issued that requires reversing the motor movement, the reference generator does automatically the following operations:
| • | stops the motor with the programmed deceleration rate |
| • | accelerates the motor in the opposite direction till the slew speed is reached, or till the motor has to decelerate |
| • | stops the motor on the commanded position |
See also:
Trapezoidal Position Profiles – TML Programming Details
Trapezoidal Position Profiles – Related TML Instruction and Data
Trapezoidal Position Profiles – Automatic elimination of round-off errors