Syntax
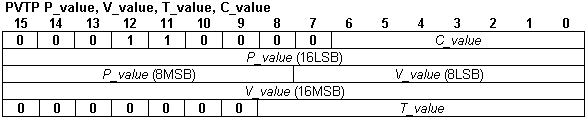
PVTP P_value, V_value, T_value, C_value |
Define a PVT point via immediate values |
PVTP P_var, V_var, T_var, C_value |
Define a PVT point via TML variables |
| Operands | P_value – 24-bit long integer immediate value: PVT point position |
V_value – 24-bit fixed immediate value (16MSB integer part and 8LSB fractional part): PVT point velocity
T_value – 9-bit integer immediate value: PVT point time
C_value – 7-bit integer immediate value, PVT point integrity counter
P_var – long variable, contains the PVT point position
V_var – fixed variable, contains the PVT point velocity
T_var – integer variable, contains the PVT point time
![]()
Binary code

| Description | Defines a PVT point. The PVT position, velocity and time values may be provided either as immediate values or via the values of 3 TML variables. |
A PVT point also includes a 7-bit integrity counter. The host must increment by one the integrity counter each time when it sends a new PVT point. If the integrity counter error checking is activated, every time when the drive/motor receives a new PVT point, it compares it’s internally computed integrity counter value with the one sent with the PVTP command. The PVT point is accepted only if the two values are equal. If the values of the two integrity counters do not match, the integrity check error is triggered, the drive/motor sends the PVTSTS to the host with PVTSTS.12 =1 and the PVT point received is discarded. Each time a PVT point is accepted, the drive/motor automatically increments its internal integrity counter.
Example
SETPVT 0xCF00; //Clear PVT buffer
MODE PVT; // Set PVT Mode
TUM1; //Start from actual value of position reference
CPR;
PVTP 12000L, 0.04, 300U, 0;//PVT(6[rot], 1.199[rpm], 0.3[s])
UPD; //Execute immediate
PVTP -8000L, 0, 200U, 0;//PVT(2[rot], 0[rpm], 0.5[s])
!MC; WAIT!; //wait for completion