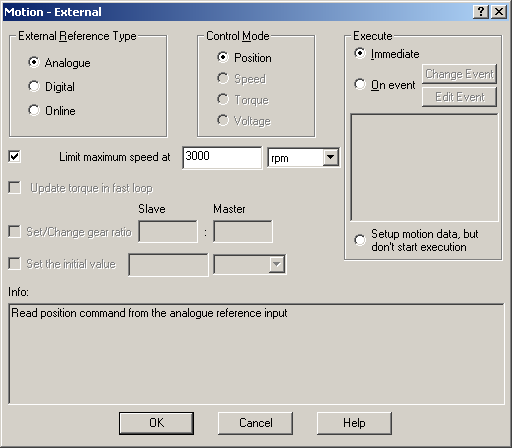
The “Motion – External” dialogue allows you to program the slave drives/motors to work with an external reference provided by another device. There are 3 types of external references:
| • | Analogue – read by the slave drive/motor via a dedicated analogue input (10-bit resolution) |
| • | Digital – computed by the slave drive/motor from: |
| ▪ | Pulse & direction signals |
| ▪ | Quadrature signals like A, B signals of an incremental encoder |
| • | Online – received online via a communication channel from a host and saved in a dedicated TML variable |
First select the Slave axis that will execute the S-curve profile and then choose the external reference type.
Remark: If there are no slaves selected in the Axis Selection window then the external reference will be used by the motion controller with integrated drive.
Select Analogue if the external reference is an analogue signal. This signal is interpreted as a:
| • | Position reference, if the slave drive/motor was setup for position control |
| • | Speed reference, if the slave drive/motor was setup for speed control |
| • | Current/torque reference, if the slave drive/motor was setup for torque control |
Remark: Check the slave drive/motor setup for the correspondence between the analogue input voltage and the reference values.
In position control, check Limit maximum speed at and set a desired value, if you want to avoid mechanical shocks by limiting the maximum speed at sudden changes of the position reference. In speed control, check Limit maximum acceleration at and set a desired value, if you want a smoother transition at sudden changes of the speed reference. In torque control, check Update torque in fast loop if you want to read the analogue input at each fast loop sampling period. When unchecked, the analogue input is read at each slow loop sampling period.
Select Digital if the external reference is provided as pulse & direction or quadrature encoder signals. In either case, the slave drive/motor performs a position control with the reference computed from the external signals. Check Set/Change gear ratio if you want to follow the external position reference with a different ratio than 1:1. Set the desired Slave / Master ratio.
Remarks:
| • | A 1:3 ratio means that the actual position reference, TPOS, is 1/3 of the external reference. |
| • | Due to an automatic compensation procedure, the actual position reference is computed correctly without cumulating errors, even if the ratio is an irrational number like 1: 3 |
Select Online if an external device sends the reference via a communication channel. Depending on the Control Mode chosen, the external reference is saved in one of the TML variables:
| • | EREFP, which becomes the position reference if the Control Mode selected is Position |
| • | EREFS, which becomes the speed reference if the Control Mode selected is Speed |
| • | EREFT, which becomes the torque reference if the Control Mode selected is Torque |
| • | EREFV, which becomes voltage reference if the Control Mode selected is Voltage |
If the external device starts sending the reference AFTER the external online mode is activated, it may be necessary to initialize EREFP, EREFS, EREFT or EREFV. Check Set the initial value to set the desired starting value.
Remarks:
| • | The external online mode may also be used as a test mode in which you assign in EREFP, EREFS, EREFT or EREFV the desired reference |
| • | Use external online voltage mode with caution. If the motor is moving, an abrupt reduction of the voltage reference may lead to a high peak of regenerated energy injected into the DC supply. Without proper surging capacity, this may cause high over-voltages |
Choose Execute Immediate to activate the external reference mode immediately when the motion sequence is encountered. Choose Execute On Event to activate the external reference on the slave drive/motor when a programmable event occurs on the motion controller. Click Change Event to select the event type or Edit Event to modify the parameters of the selected event (see Events for details). Select Setup motion data, but don’t start execution if you want to set the external reference mode parameters for a later use.
OK: Close this dialogue and save the motion sequence in your motion sequence list.
Cancel: Close this dialogue without saving the motion sequence in your motion sequence list.
Help: Open this help page.
See also:
External –TML Programming Details