The “Motion – Electronic Gearing” dialogue allows you to set a drive/motor as master or a slave for electronic gearing mode.
When set as master, a drive/motor sends its position via a multi-axis communication channel, like the CANbus. The master sends either the load position or the position reference once at each slow loop sampling time interval.
When set as slave, a drive/motor follows the master position with a programmable ratio. The slaves can get the master position in two ways:
| 1. | Via a communication channel, from a drive/motor set as master |
| 2. | Via an external digital reference of type pulse & direction or quadrature encoder. Both options have dedicated inputs. The pulse & direction signals are usually provided by an indexer and must be connected to the pulse & direction inputs of the drive/motor. The quadrature encoder signals are usually provided by an encoder on the master and must be connected to the 2nd encoder inputs. |
Remark: In case 2, you don’t need to program a drive/motor as master in electronic gearing
Select Master tab to set a drive/motor as master in electronic gearing.
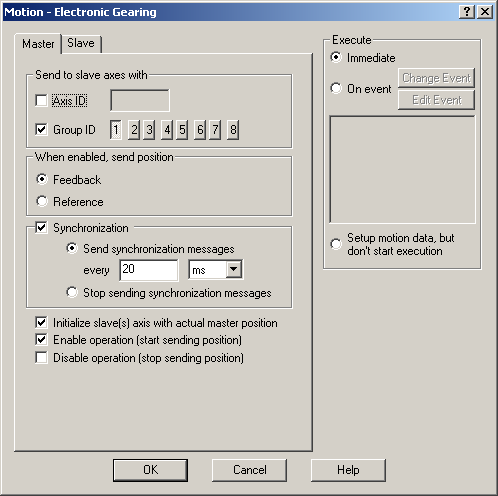
If the master sends its position to a single drive/motor, check the Axis ID and fill the associated field with the axis ID of the slave. If the master sends its position to more drives, indicate the Group ID of the slaves. Select one groups of drives (1 to 8) to which the master should send its position.
Remark: You need to specify the Axis ID or the Group ID where master sends its position only the first time (after power on) when a drive is set as master. If the master mode is later on disabled, then enabled again, there is no need to set again the Axis ID or the Group ID, as long as they remain unchanged. In this case, just uncheck both the Axis ID and the Group ID.
Select Feedback, to set the master sending its load position, or Reference, for sending its position reference.
Remark: The feedback option is disabled if the master operates in open loop. It is meaningless if the master drive has no position sensor.
Check Synchronization to activate the synchronization procedure between the master and the slave axes. Select Send synchronization messages and set the time interval between synchronization messages. Recommended starting value is 20ms. When synchronization procedure is active, the execution of the control loops on the slaves is synchronized with those of the master within a 10µs time interval. Due to this powerful feature, drifts between master and slave axes are eliminated. Select Don’t send synchronization to disable the synchronization procedure.
If the master activation is done AFTER the slaves are set in electronic gearing mode, check Initialize slave(s) axis with master position. This determines the master to send an initialization message to the slaves.
Check Enable operation to activate the master mode and start the sending of master position to the slaves. Check Disable operation to deactivate the master mode and stop sending of master position to the slaves. Note that enabling or disabling master operation has no effect on the motion executed by the master.
Choose Execute Immediate to enable the slave operation mode immediately when the motion sequence is encountered. Choose Execute On Event to start the slave operation mode when a programmable event occurs. Click Change Event to select the event type or Edit Event to modify the parameters of the selected event (see Events for details). Select Setup motion data, but don’t start execution if you want to prepare the slave operation mode for a later execution.
Select Slave tab to set a drive/motor as slave in electronic gearing.
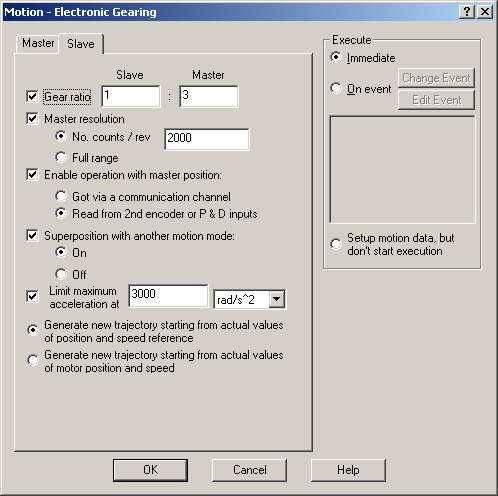
Check Gear Ratio to set/change the gear ratio with which the slave follows the master position. The gear ratio is specified as a ratio of 2 integer values: Slave / Master. The slave value is signed, while the master one is unsigned. The sign indicates the direction of movement: positive – same as the master, negative – reversed to the master.
Remarks:
| • | Slave=1 and Master=3, means that slave does 1/3 of master displacement and its speed is 1/3 of the master speed |
| • | Due to an automatic compensation procedure, the slave reference is computed correctly without cumulating errors, even if the ratio is an irrational number like 1: 3 |
Check Master Resolution to specify the number of encoder counts per one revolution of the master motor. The slaves need the master resolution to compute correctly the master position and speed (i.e. position increment). Select Full range if master position is not cyclic (e.g. the resolution is equal with the whole 32-bit range of position). In this case the master resolution is set to value 0x80000001.
Check Enable operation with master position and select how to get the master position: via communication or via an external reference. Leave unchecked if you want to set the slave parameters without enabling slave operation mode.
Check Superposition with other motions and select On or Off to enable or disable the superposition of the electronic gearing mode with a second motion mode. When this superposed mode activated, the position reference is computed as the sum of the position references for each of the 2 superposed motions.
You may enable the superposed mode at any moment, independently of the activation/deactivation of the electronic gearing slave. If the superposed mode is activated during an electronic gearing motion, any subsequent motion mode change is treated as a second move to be superposed over the basic electronic gearing move, instead of replacing it. If the superposed mode is activated during another motion mode, a second electronic gearing mode will start using the motion parameters previously set. This move is superposed over the first one. After the first move ends, any other subsequent motion will be added to the electronic gearing.
When you disable the superposed mode, the electronic gearing slave move is stopped and the drive/motor executes only the other motion. If you want to remain in the electronic gearing slave mode, set first the electronic gearing slave move and then disable the superposed mode.
Check Limit maximum acceleration at, to smooth slave coupling with the master, when this operation is done with master running at high speed. This option limits the slave acceleration during coupling to the programmed value.
Remark: Bit 12 from the Status Register High is set (SRH.12 = 1), when slave coupling with the master is complete. The same bit is reset to zero if the slave is decoupled from the master. The bit has no significance in other motion modes.
Select Generate new trajectory starting from actual values of position and speed reference if you want the reference generator to compute the slave position starting from the actual values of the position and speed reference. Select Generate new trajectory starting from actual values of load/motor position and speed if you want the reference generator to compute the slave position starting from the actual values of the load/motor position and speed.
Choose Execute Immediate to enable the slave operation mode immediately when the motion sequence is encountered. Choose Execute On Event to start the slave operation mode when a programmable event occurs. Click Change Event to select the event type or Edit Event to modify the parameters of the selected event (see Events for details). Select Setup motion data, but don’t start execution if you want to prepare the slave operation mode for a later execution.
OK: Close this dialogue and save the motion sequence in your motion sequence list.
Cancel: Close this dialogue without saving the motion sequence in your motion sequence list.
Help: Open this help page
See also:
Electronic Gearing – TML Programming Details
Electronic Gearing – TML Instruction and Data
Internal Units and Scaling Factors