Syntax
LPOS1 Pos_X, Pos_Y, Pos_Z |
3D Linear interpolation POS segment |
LPOS2 Pos_X, Pos_Y, Pos_Z |
|
LPOS1 Pos_X, Pos_Y |
2D Linear interpolation POS segment |
LPOS2 Pos_X, Pos_Y |
| Operands | Pos_X: X axis position increment for 2D/3D trajectory |
Pos_Y: Y axis position increment for 2D/3D trajectory
Pos_Z : Z axis position increment for 3D trajectory
![]()
Binary code
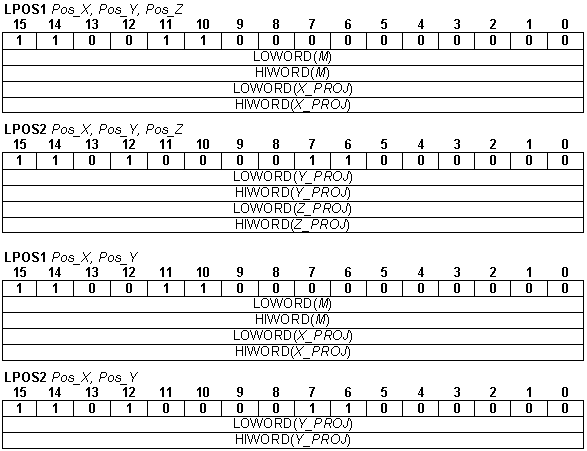
| Description | LPOS1 and LPOS2 define a segment for 2D/3D trajectory executed in Linear Interpolation mode. Based on Pos_X, Pos_Y and Pos_Z the TML compiler from EasyMotion Studio computes the actual parameters used by the motion controller to generate the PVT points for slave axes. |
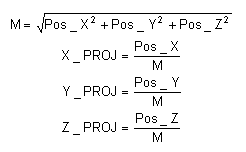
If the points are sent from a host then the following relations must be used to compute the actual parameters of the segment:
| Example |
// 2D linear interpolated profile. Position feedbacks: 500 lines
//incremental encoder
SETMODE 0xCF00; //Clear buffer
LPLANE (A, C); //Slaves A and C define the coordinate system
MODE LI; // Set Linear Interpolation Mode
// Increment position with (X, Y) = (0.5[rot], 0.05[rot])
LPOS1 1000L, 100L; LPOS2 1000L, 100L;
UPD; //Execute immediate
// Increment position with (X, Y) = (0.05[rot], 0.5[rot])
LPOS1 100L, 1000L; LPOS2 100L, 1000L;
// Increment position with (X, Y) = (0.5[rot], 0.1[rot])
LPOS1 1000L, 200L; LPOS2 1000L, 200L;
// Increment position with (X, Y) = (0.5[rot], 0.5[rot])
LPOS1 1000L, 1000L; LPOS2 1000L, 1000L;