Introduction
In many motion control applications, handling high-inertia loads presents a significant challenge. Rapid starts or abrupt stops can introduce mechanical stress, vibrations, and excessive wear on the system, leading to reduced performance and increased maintenance costs. To address these challenges, Technosoft drives feature advanced trajectory generation algorithms, including the S-curve profile, which allows for smoother transitions in acceleration and deceleration.
Unlike simple trapezoidal profiles that apply sudden changes in acceleration, the S-curve profile manages the “jerk” — the rate of change of acceleration. By controlling jerk, the S-curve profile provides a gradual ramping effect, allowing both starting and stopping sequences to remain smooth and controlled. This makes it particularly valuable when driving high inertia loads, where uncontrolled movement could otherwise compromise precision, safety, or mechanical integrity.
Understanding the S-Curve Profile
In motion control, velocity defines how position changes over time, acceleration defines how velocity changes, and jerk measures how acceleration itself changes.
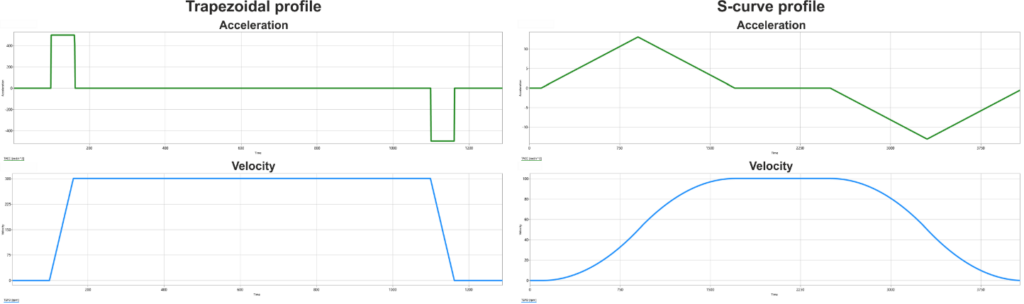
Traditional trapezoidal profiles “jump” from zero acceleration to a constant value instantly, producing a theoretically “infinite” jerk at transition points. This abrupt change often excites mechanical resonances and results in torque peaks that propagate through couplings and gear trains.
The S-curve profile smoothens these transitions by limiting jerk. Acceleration increases and decreases progressively, forming a rounded, “S-shaped” velocity curve. The result is a motion path that distributes acceleration smoothly across each motion segment.
The Mathematics of Motion: Seven-Phase Profile
An S-curve motion typically consists of seven distinct phases, compared to only three in a trapezoidal move:
- Acceleration increases gradually (positive jerk)
- Acceleration holds at its maximum value
- Acceleration decreases to zero (negative jerk)
- Constant velocity (cruise)
- Deceleration increases gradually (negative jerk)
- Deceleration holds at maximum
- Deceleration decreases to zero (positive jerk)
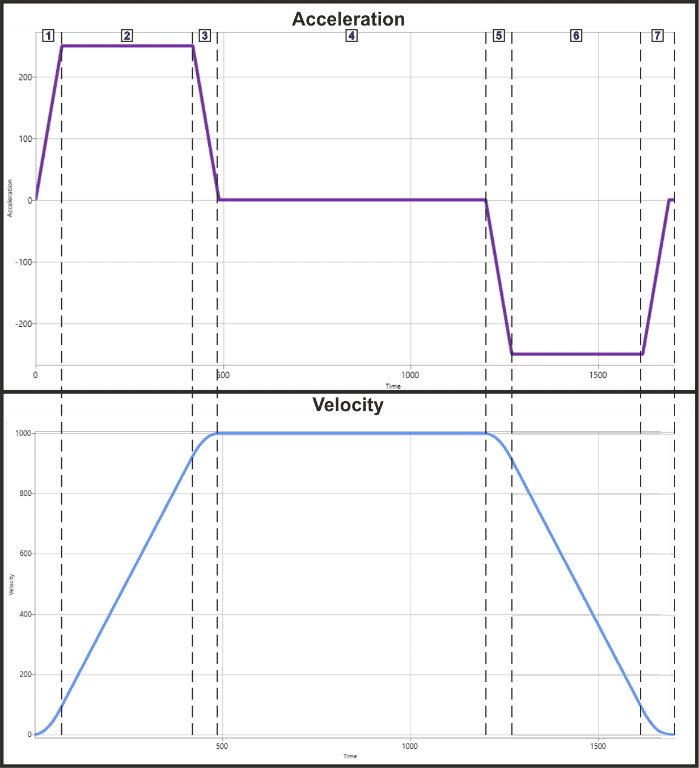
These phases create a symmetric, jerk-limited motion curve. By spreading acceleration and deceleration changes over time, the profile minimizes mechanical excitation and enables smoother motion even under demanding load conditions.
By controlling jerk, several key improvements are achieved:
- Reduced vibration and mechanical stress — Smooth acceleration transitions reduce mechanical resonances and extend component life.
- Lower torque peaks — The motor current follows a softer curve, minimizing stress on the drive and power stage.
- Improved positioning accuracy — Smooth deceleration prevents overshoot and allows faster settling at the target position.
- Trajectory blending — Consecutive S-curve moves can connect seamlessly, providing continuous and fluid motion in multi-segment trajectories.
Implementation in Technosoft Drives
Technosoft drives integrate S-curve profile generation directly into their motion control structure. The feature can be configured either through EasyMotion Studio II or by commands in the Technosoft Motion Language (TML).
When programming an S-curve motion, users define:
- Position mode: Absolute (target position) or Relative (incremental move).
- Slew speed: the maximum allowed velocity.
- Acceleration: the limits that shape the ramp.
- Jerk rate: the rate at which acceleration increases or decreases, defining how smooth the transitions are.

Once these values are set, the drive’s internal reference generator constructs a jerk-limited trajectory that the position loop follows precisely.
Practical Applications
The benefits of S-curve motion are especially visible in high inertia and precision systems where abrupt transitions would otherwise cause vibration or control instability.
- Conveyor Systems: Smooth acceleration prevents slipping or shifting of heavy payloads and reduces belt wear.
- Packaging Lines: Controlled motion allows accurate product placement without sudden jerks that can disrupt operation.
- Robotic Axes and Gantries: Gradual velocity changes eliminate oscillations, increasing positioning repeatability and extending mechanical lifespan.
- Rotary Platforms and Indexers: Controlled torque application avoids resonance during acceleration and deceleration phases.
Conclusion
The S-curve profile available in Technosoft drives is a powerful feature for applications involving high-inertia or precision-sensitive loads. By limiting jerk, it reduces stress, vibrations, and overshoot while improving motion quality and system longevity.
With simple setup in EasyMotion Studio II, engineers can apply S-curve motion to a wide range of applications. The result is smoother starting and stopping, higher precision, and more reliable operation in demanding environments — a motion path that’s not only efficient, but elegant in its control.
Contact our team today!




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}