- Introduction
In every industry, manufacturers must look at every aspect such as the mechanics, motor, sensors, communication, size and shape of the machine etc. All of these must work together seamlessly to bring the best results starting from the initial requirements of the machine, in such a way that after adding up all the costs, it is as economical as it can possibly be.
Such is the case for the automation industry, from the type of motor technology, gearboxes, feedback devices, load mechanics, movement type and requirements, motor drives which can perform them, safety compliance and the communication protocol that brings all of them together. Technosoft’s solutions cover all the mentioned aspects, this way manufacturers will have a smoother development time using the iPOS line of drives.
Next, we shall discuss about motors and how they are controlled. In the automation industry, the most frequently used types are:
- DC brushed motors: rotary or linear (voice coil)
- AC brushless motors: rotary or linear
- Stepper motors
Each type has its own advantages and disadvantages, being an important step in the decision making of any manufacturer. Technosoft iPOS line of drives offers the possibility of controlling any of them as an “all in one” solution.
The “all in one” solution is the result of years of cumulated “know how” and experience applied in a hardware and software combination. On the software side, iPOS drives use Field Oriented Control (FOC or Vector Control) algorithm which ensures maximum torque with minimum current inside AC motors with the help of a feedback sensor. In the same time, we are able to control DC brushed motors as well as Stepper motors, for the latter one the control option is twofold: “Open loop” (no feedback sensor) or “Closed loop” (using feedback sensor) which also controls a rotating vector of current in the motor, like the case of the brushless motor.
This article focuses on the advanced capabilities of FOC, why it is needed and how does it compare to other alternative control solutions for AC motor control.
- What is FOC and why is it needed
Field Oriented Control is the result of the need to be able to control AC motors in a similar fashion and capabilities (maximum torque) as a DC brushed motor. This is important because the AC motors have one big advantage over the DC brushed motors: not having the brushes – commutator structure which is the weak point of the motor being prone to wear and tear and therefore requiring periodic maintenance and parts replacement.
That being said, FOC algorithm is ultimately tied to always knowing the precise position of the motor rotor (typically read from an encoder) in relation to the motor stator to maintain the alignment between their magnetic fluxes. This way the driver can precisely apply the current vector thus achieving maximum torque with minimum current or power consumption.
The 3 phase currents are read from the motor and transformed from the 120 degrees phase shifted system into a 2 phase, 90 degrees apart currents system (Iq and Id), for easier computations, using the Clarke and Park transforms. The values of the currents are fed to the current controller and its job is to compare them to the current reference, calculate and apply the resulting voltage command to the motor winding by transforming them back into a 3 phase system (using the reverse Park and Clarke transforms).
Furthermore, to obtain maximum torque, the FOC algorithm relies on the fact that the magnetic flux from the rotor and the one generated by the drive in the stator are always at a 90-degree angle from each other. This is where the encoder is used (and why some kind of position feedback is mandatory for FOC) – to measure the actual position of the rotor so that the drive “knows” where to apply the voltages / currents on the stator to generate the magnetic flux accordingly.
Besides the current controller, there is also the position controller and speed controller. Position and speed of the motor are also determined with the help of the encoder and fed to the two controllers resulting in the following control structure:
 The difference between position demand and rotor position is fed to the Position controller and it outputs a speed command to the speed controller; the rotor speed being measured based on the rotor position over time allows for the speed controller to output a current (torque) command.
The difference between position demand and rotor position is fed to the Position controller and it outputs a speed command to the speed controller; the rotor speed being measured based on the rotor position over time allows for the speed controller to output a current (torque) command.
Depending on the need, users can configure via the EasyMotion Studio II software, the control structure to be one of the following: Position + Speed + Current, Position + Current, Speed + Current or just Current (Torque).
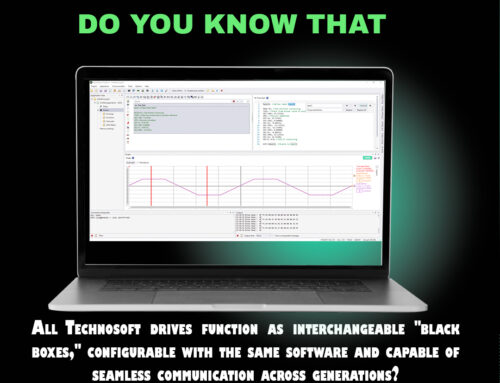
Using the Logger tool provided by Technosoft’s EasyMotion Studio II software, we can observe the 3 phased currents (Ia, Ib, Ic, read from the motor phases) as well as the computed Iq and Id currents:

It can be observed how the 3 phased currents are sinusoidal and have a phase difference of 120 electrical degrees. The Id current is always maintained at 0A (due to the fact that the motor has permanent magnets therefore the magnetic flux doesn’t need to be generated from outside) and the Iq is the peak of sine value of the 3 phased currents and not RMS.
- Advantages and disadvantages compared to other motion control solutions (Scalar U/f)
Another type of AC motor controller solution used in the industry is the Frequency control (otherwise named Scalar control). This is an open loop solution (no feedback) and controls the motor using voltage and frequency references modulated into PWM signals. The controller changes the values of voltage and frequency while maintaining a constant U/f ratio.
A feedback sensor is not required, thus being a much simpler solution lowering the overall cost levels. This method has the drawback of not knowing the precise rotor position; therefore, the torque cannot be controlled. This method is typically used in low accuracy applications due to its simplicity and reduced cost levels.
Below are listed the advantages and disadvantages of both methods.
Field oriented control:
| Advantages | Disadvantages |
|---|---|
| Torque is controlled | More costly |
| Suited for high accuracy applications | Need of feedback from an encoder |
| Closed loop control | |
| Full torque applied at 0rpm speed |
Scalar control:
| Advantages | Disadvantages |
|---|---|
| Suited for low accuracy applications | Very low accuracy |
| Open loop control | Torque is not controlled |
| Encoder not required | Position cannot be controlled |
| Low cost | |
| Simple solution | |
| Speed encoder can be added | Added costs |
- Automatic Tuning
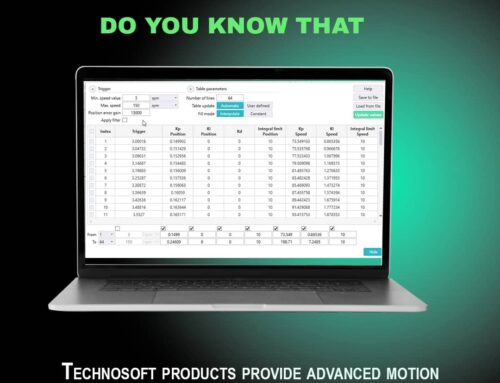
Depending on the configuration chosen of the control scheme (PSC, PC, SC or C) a precise tuning of the controllers must be done, more exactly finding the values of the gains (Kp, Ki and Kd), to obtain the best response of the motion. Using EasyMotion Studio II, this can be easily done with the Autotuning feature. This is a powerful tool made to automatically determine the best set of gains possible, regardless of the motor type.
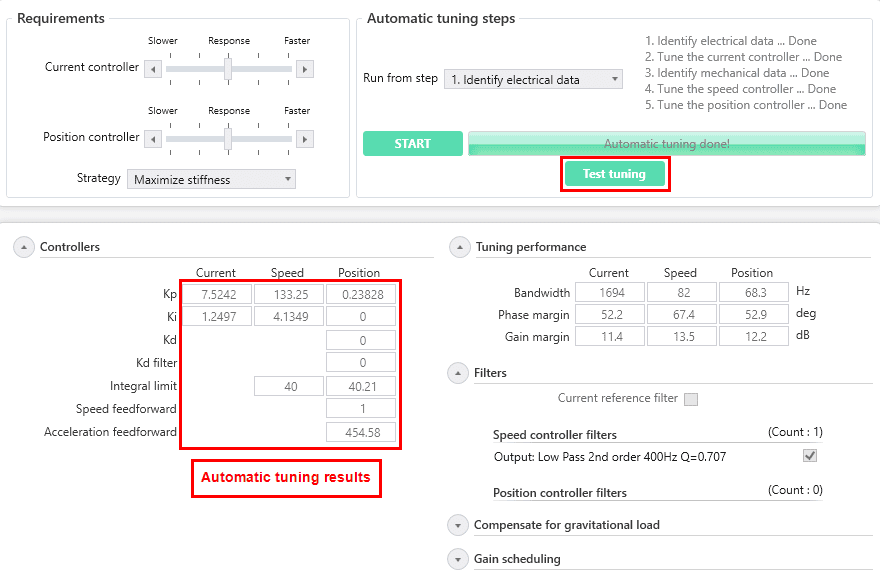
Once the procedure is finished, the user has the possibility to test the result and if needed make adjustments to really fine tune the drive performance even further.
- Conclusions
Field oriented control is the proven solution for demanding and high accuracy motion control applications due to its ability to achieve maximum torque and high precision motion using brushless motors, with the help of a position feedback sensor.
Although a motor controller drive using vector control algorithms is more expensive compared to a simple AC drive with frequency control, Technosoft’s line of iPOS drives manages to combine very competitive prices with the high capabilities of an FOC drive.
The “one for all” solution of Technosoft’s iPOS line of motor control drives adds unparalleled flexibility in the machine design by allowing the same drive to be used for a wide variety of motor technologies
Contact our team today!




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}